|
|
После выполнения соответствующих преобразований получают следующее выражение для дисперсии погрешности фильтрации:

Оптимальное значение параметра настройки у получают из необходимого условия экстремума функции Dф(у):
![]()
откуда

Таким образом, функция Dф(у) имеет единственную точку стационарности, тип которой зависит от знака второй производной при y=y0- Можно показать, что при выполнении условия
![]()
особая точка является минимумом функции Dф(у), а при выполнении условия km<1 в точке y = y° функция Dф(у) достигает максимума Таким образом, если сочетание характеристик полезного сигнала и помехи соответствует случаю (3.32а),то опти-мальное значение параметра настройки определяется по формуле (3.32). Если это условие не выполняется, то оптимальным является наибольшее допустимое значение параметра у-
При программной реализации экспоненциального фильтра дифференциальное уравнение (3,28) заменяют разностным уравнением вида
|
|
где i — номер цикла расчета.
Отсюда получают следующее рекуррентное соотношение для вычисления сглаженного значения yф(j) в очередном j-том цикле расчета:
![]()
К достоинствам алгоритма экспоненциальной фильтрации относятся малая трудоемкость расчетов и Малый объем памяти УВМ, в которой должна храниться величина у и обновляемая в каждом цикле расчета величина yф(j—1).
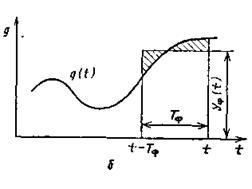
Фильтр скользящего среднего в аналоговом варианте реализует вычисление среднего значения функции g(t)
|
|
|
|
|
|
|
|
|
на интервале времени от t—Тф до t(рис. 3.9, б): |
где Тф — параметр настройки фильтра (время усреднения).
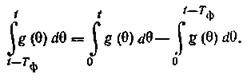
Преобразуем правую часть выражения (3.34), представив его в виде:
|
|
|
которое аналогично по структуре выражению (3 12) и может быть преобразовано к виду |
|
|
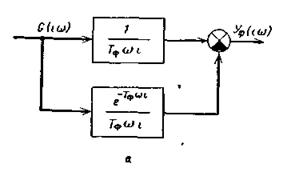
Отсюда видно, что фильтр скользящего среднего представляет собой параллельное соединение двух интегрирующих звеньев, одно из которых последовательно соединено со звеном запаздывания (рис. 3.9а). Поэтому амплитудно-фазовая характеристика фильтра описывается выражением
Решая совместно (3.24) — (3.27) и (335), можно получить выражение для дисперсии погрешности Dф фильтра скользящего среднего и определить оптимальное значение рф параметра, настройки из необходимого условия минимума функции Dф(Tф). Получаемое при этом выражение очень громоздко, неудобно для практического использования. На его основе рассчитаны номограммы [24], по которым для заданных значений a, m, kможно определить Т°ф.
При программной реализации фильтра скользящего среднего расчет сглаженного значения уф(j) в очередном j-том цикле проводится по формуле

где N—T$,lto— параметр настройки фильтра
Для расчета по формуле (3.36) требуется хранить в памяти УВМ (N+1) значение функции g(jt0).
Статистические фильтры. Статистическими называют фильтры, которые в аналоговом варианте представляют собой параллельное соединение (n+1) цепочек, состоящих из усилительного зве-
|
|
|
на интервале времени от t—Тф до t(рис. 3.9, б): |
где Тф — параметр настройки фильтра (время усреднения).
Преобразуем правую часть выражения (3.34), представив его в виде:
|
|
|
которое аналогично по структуре выражению (3 12) и может быть преобразовано к виду |
|
|
Отсюда видно, что фильтр скользящего среднего представляет собой параллельное соединение двух интегрирующих звеньев, одно из которых последовательно соединено со звеном запаздывания (рис. 3.9а). Поэтому амплитудно-фазовая характеристика фильтра описывается выражением
Решая совместно (3.24) — (3.27) и (335), можно получить выражение для дисперсии погрешности Dф фильтра скользящего среднего и определить оптимальное значение рф параметра, настройки из необходимого условия минимума функции Dф(Т$). Получаемое при этом выражение очень громоздко, неудобно для практического использования. На его основе рассчитаны номограммы [24], по которым для заданных значений a, m, kможно определить Т°ф.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.