В общем случае восстановление непрерывного сигнала по решетчатой функции
производится формирующим фильтром, представляющим собой линейное динамическое
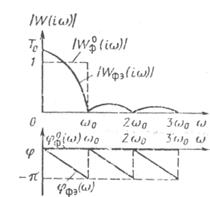
звено с амплитудно-фазовой характеристикой (АФХ) ![]() (рис.
3.2). Следовательно,
для восстановленного сигнала справедливо следующее соотношение:
(рис.
3.2). Следовательно,
для восстановленного сигнала справедливо следующее соотношение:
![]()
где G*(to) —преобразование Фурье функции g*(jt0).
Из теории импульсных систем известно [55], что спектр решетчатой
функции является периодической функцией с периодом, равным частоте квантования ![]()
Смещенные компоненты спектра могут частично перекрывать
друг друга, причем степень перекрытия увеличивается по мере, уменьшения частоты ![]() т.
е. при увеличении периода квантования t0 (рис. 3.3). В
результате наложения спектр решетчатой функции искажается, и из него невозможно
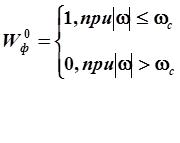
выделить спектр исходной непрерывной функции. Исключение составляет физически нереализуемый случай, когда спектр
непрерывной функции ограничен,
т.
е. при увеличении периода квантования t0 (рис. 3.3). В
результате наложения спектр решетчатой функции искажается, и из него невозможно
выделить спектр исходной непрерывной функции. Исключение составляет физически нереализуемый случай, когда спектр
непрерывной функции ограничен,
т.е.
![]() при
при ![]()
![]()
а частота квантования удовлетворяет условию
![]() . (3.6)
. (3.6)
При этом смещенные компоненты в спектре решетчатой функции g(jt0) не перекрываются, и из него можно выделить главную несмещенную составляющую, совпадающую со спектром непрерывной функции g(t) (см. рис. 3.3). Для точного восстановления исходной непрерывной функции по решетчатой функции необходимо использовать идеальный нереализуемый фильтр с АФХ
Действительно, погрешность восстановления, очевидно, равна
![]()
или в преобразованном по Фурье виде —
![]() (3.8)
(3.8)
Для идеального фильтра (3.7) при выполнении условия (3.6) справедливо равенство
![]() (3.9)
(3.9)
и, следовательно
![]()
Соотношение (3.6) составляет содержание теоремы Котельникова — Шеннона, которая определяет необходимые условия передачи без искажения информации, содержащейся в непрерывном сигнале при его квантовании по времени и последующем восстановлении.
Если для восстановления используют фильтр с АФХ Wф(iω), отличающейся от (3.7), то даже при выполнении условия (3.6) точное восстановление исходной непрерывной функции невозможно. Погрешность восстановления получим, применив обратное преобразование Фурье к выражению (3.8) с учетом (3.9):
 (3.10)
(3.10)
Таким образом, погрешность восстановления зависит от свойств исходной функции g(t), периода квантования t0 [эти два фактора определяют G*(iω)J и АФХ формирующего фильтра
Рассмотрим наиболее распространенные методы экстраполяции и интерполяции.
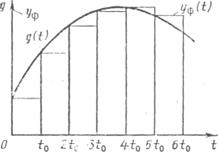
Метод ступенчатой экстраполяции (экстраполятор нулевого v порядка) состоит в том, что значение восстанавливаемой функции yф(t) для любого момента времени jt0<t<(j+l)to принимают равным g*(jtQ) рис. 3.4):
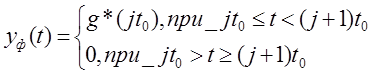 (3.11)
(3.11)
Сигнал, восстановленный по алгоритму (3.11), можно, очевидно рассматривать как сумму двух направленных в разные стороны скачков с амплитудой g*(//0), один из которых сдвинут по времени на t0
![]()
|
|
|
|
Рис. З.4. Ступенчатая экстраполяция функции g(t)
Рис. 3.5. Частотные характеристики фильтров:
пунктир — идеального; сплошная линия — экстраполятора нулевого порядка
Следовательно, АФХ экстраполятора нулевого порядка равна:
![]() (3.12)
(3.12)
Это выражение можно преобразовать, используя тригонометрическую форму комплексного числа
|
|
|
и тригонометрические функции кратных углов: |
ё ![]() = cos (ωt0) — г sin(ωt0) . и тригонометрические
функции кратных углов:
= cos (ωt0) — г sin(ωt0) . и тригонометрические
функции кратных углов:
|
|
1-е
Подставляя полученное выражение в (3.12) и учитывая, что
|
|
получим
получим
|
|
Погрешность экстраполяции обусловлена различием амплитудно-фазовых
|
|
характеристик идеального фильтра (3.7) и экстраполятора нулевого порядка (рис. 3.5). Для расчета погрешности ступенчатой экстраполяции из частотной области удобно перейти к рассмотрению сигналов y$>(t) и g(t) (см. рис. 3.4). Погрешность экстраполяции, очевидно, равна
|
|
Перейдем в этом выражении к новой переменной τ=t-jt0 , которая может изменяться в пределахот 0 до t0 тогда (3.13) можно записать в виде еэ(t)=g(0)-g(τ).
Если g(t) является стационарной случайной переменной, то математическое ожидание погрешности еэ(t) при усреднении по множеству интервалов τj=t-jt0 , j=0,1,2… равно нулю, так как
в силу линейности операции определения математического ожидания
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.