 и
и  .
.
Для червячной передачи (рис. У.2,в), червяк которой имеет K заходов, а червячное колесо – Z зубьев:
 и
и ![]() .
.
В ременных передачах (рис. У.2,г) кроме ремённозубчатых имеет место проскальзывание и это учитывают соответствующим коэффициентом (hр[3]):
 и
и  ,
,
где d1 и d2 – рабочие диаметры шкивов;
hр = 1–e и e » 0,02 – относительное скольжение ремня.
а) б) в) г)
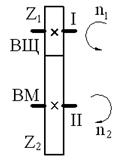
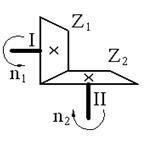
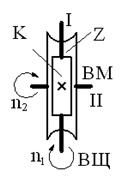
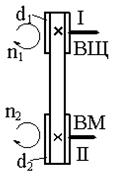
Рис. У.2. Кинематические пары для передачи вращательного движения:
а, б, в – зубчатые цилиндрическая, коническая, червячная; г – ременная
Передачи, преобразующие вращательное движение в прямолинейное, характеризуются величиной перемещения поступательно движущегося элемента за один оборот приводного вала. Для таких передач часто увязывают скорость прямолинейного перемещения ведомого звена (v, S) с частотой вращения (n) ведущего.
Эта зависимость будет:
- для винтовой передачи с однозаходным винтом (рис. У.3,а) – S = t×n,
с многозаходным винтом – S = Н×n= K×t×n,
где t и Н – шаг и ход винта;
K – число его заходов;
- для зубчато-реечной и червячно-реечной передач (рис. У.3,б,в), соответственно,
S = t×Z×n = p×m×Z×n и S = t×K×n = p×m×K×n,
где t и m – шаг и модуль зацепления;
Z – число зубьев реечного колеса;
K – число заходов червяка.
а) б) в)
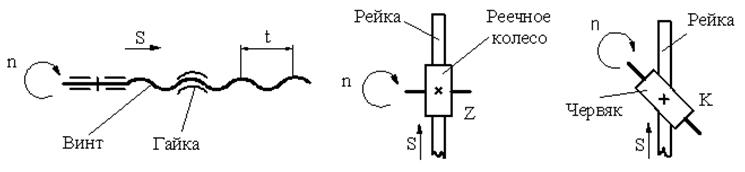
Рис. У.3. Кинематические пары для преобразования вращательного движения в поступательное:
а – винтовая; б – зубчато-реечная; в – червячно-реечная
Вращательное движение преобразуется в прямолинейное также с помощью других передач и ряда механизмов (кривошипно-шатунных, кривошипно-кулисных, кулачковых и др.).
2.2.1.3 Совокупность передач привода определяет движение рабочих органов, т.е. кинематику их, и её называют кинематической цепью. В кинематические цепи могут входить как отдельные передачи, так и группы передач (групповые передачи).
Произвольный пример кинематической цепи, состоящей из клиноременной, четырёх зубчатых и цепной передач, приведён на рис. У.4.
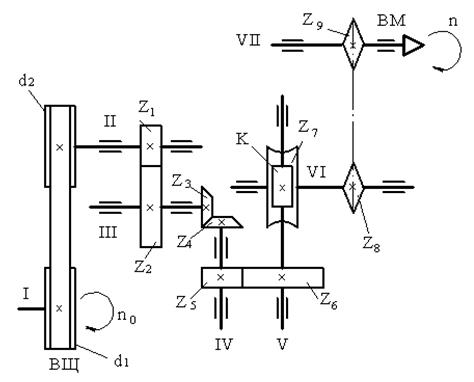
Полное передаточное отношение кинематической цепи равно произведению передаточных отношений всех кинематических пар, составляющих цепь.
Полное передаточное отношение I кинематической цепи, показанной в качестве примера на рис. У.4, будет равно:
![]() ,
,
здесь Z8 и Z9 – числа зубьев звёздочек цепной передачи.
Направление передачи движения записывается в виде т.н. расчётного перемещения или расчётных перемещений конечных звеньев.
Так, если nо и n – частоты вращения ведущего и ведомого валов или начального и конечного звеньев кинематической цепи, то расчётное перемещение представляют в виде: nо®n. А если nо и S – частота вращения ведущего вала кинематической цепи и скорость перемещения ведомого звена – гайки винтовой передачи шага t, то расчётное перемещение будет: nо®S(подробнее см. п. 3.2).
Очевидно, в первом случае – n = nо×I, а во втором – S = nо×I×t.
То или иное из этих или им подобных выражений с подробно расписанной правой частью (т.е. вместо I – произведение передаточных отношений всех кинематических пар, составляющих цепь, в виде обозначений шестерён, шкивов или конкретных чисел зубьев шестерён, диаметров шкивов, в последнем случае – и конкретных значений частот вращения, шагов резьб и т.д.) называют уравнением кинематического баланса.
Для приведённой выше кинематической цепи уравнение кинематического баланса в общем виде и в предположительно возможном числовом будет:
 и
и ![]()
Уравнение кинематического баланса позволяет определить перемещение конечного звена в зависимости от перемещения начального звена и полного передаточного отношения кинематической цепи, связывающей эти звенья, а при наличии передач, преобразующие вращательное движение в прямолинейное – и их параметров.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.