|
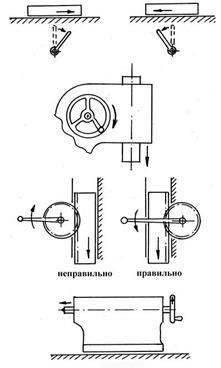
Рис. 2.14. Обеспечение мнемоничности управления перемещениями рабочих органов |
в) силы на рукоятках управления не должны превышать: 30-80 Н при редком использовании рукояток и 20-30 Н – при частом, 10 Н – на маховичках и рукоятках, устанавливаемых с большой точностью. Важными факторами удобства и лёгкости управления являются размеры, форма и расположение той части органа управления, за которую рабочий берётся рукой; г) общее количество органов управления следует уменьшать, но при этом число позиций у каждого органа управления не должно быть более 8-10; д) должна обеспечиваться безопасность работы на станках. Безопасность работы достигается, в первую очередь, конструкторскими мероприятиями: применением ограждений, хорошим освещением рабочей зоны, максимальной механизацией, созданием условий удобного управления механизмами станка. Для этого органы управления должны быть сконцентрированы и расположены в удобных зонах. Рукоятки и маховички не должны вращаться во время работы станка, электрические кнопки кроме кнопки "Стоп" должны быть утоплены в крышке; е) для предупреждения аварий, которые могут быть вызваны ошибками рабочего и недоработками в системе управления, следует: - фиксировать органы управления в каждом из занимаемых ими положений; - блокировать механизмы управления, т.е. создавать такие связи между цепями управления, которые, например, делали бы невозможным |
одновременное включение двух несовместимых движений или, в других случаях, не допускали бы включения одного движения при не включенном другом;
- ставить ограничители пути установочных движений;
- использовать сигнальные устройства;
ж) следует выполнять правило мнемоничности управления, требующее соответствия направления и характера перемещения органа управления направлению и характеру перемещения объекта управления. В качестве примеров можно рассмотреть некоторые случаи (рис. 2.14): направление перемещения узла должно совпадать с направлением поворота рукоятки, включающей это движение; если орган управления поворачивается в плоскости, перпендикулярной перемещению управляемой части станка, то при вращении этого органа по часовой стрелке перемещаемая часть станка должна удаляться от него.
2.2.11.2 Для ручного управления переключением скоростей и подач станка могут применяться многорукояточные (многорычажные) и однорукояточные (однорычажные) системы управления.
В первом случае цепи управления деталями одного и того же узла являются независимыми друг от друга, т.е. для управления каждым перемещаемым элементом предусмотрен свой орган управления – рукоятка, педаль, штурвал. Такие системы целесообразны в станках с небольшим числом переключаемых элементов и сравнительно редкими переключениями.
В случае однорукояточного управления при помощи одной рукоятки производится перемещение нескольких или всех переключаемых элементов.
При многорукояточном управлении перемещение подвижных блоков шестерен привода производится механизмами:
- с переводными рычагами (рис. 2.15,а),
- с ползунами, приводимыми реечными парами или иными способами (рис. 2.15,б).
Формы рукояток не зависят от вида механизма управления. Два из ряда возможных вариантов рукояток представлены на рис. 2.15,а,в.
Для захвата блоков на переводные рычаги устанавливаются поворотные вилки (рис. 2.15,г) или камни (рис. 2.15,г,д).
После переключений положения блоков должны фиксироваться. Фиксирующие устройства могут размещаться в самих блоках или ползунах (например, подпружиненные шарики или сухари - рис. 2.15,е), либо в рукоятках (подпружиненные шарики, штифты, сухари).
При недопустимости одновременного включения двух передач, например, в группе на 4 скорости (см. рис. 2.2,ж) или в группе на 3 скорости при разделённом блоке (см. рис. 2.2,д) должны предусматриваться блокировочные устройства. Некоторые варианты их показаны на рис. 2.15,ж.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.