На структурной сетке или ДЧВ u равно числу интервалов ряда частот вращения со знаменателем φм, т.е. u+1 частот вращения шпинделя составляет ряд со знаменателем φм.
Пусть, к примеру, z=12, u=7, тогда хk.лом =(12–7)/2=2,5 и z=12=3(1)·2(3)·2(2,5).
Структурная сетка для этого случая показана на рис. 3.5. На ней лучи передач последней группы проведены несколько несимметрично с целью упрощения построения сетки.
Диапазон регулирования привода с ломаным геометрическим рядом
![]()
или ![]()
xmax и φб.max следует определять в k-той и (k–1)-й множительных группах и φб принимать не превосходящим меньшего из двух найденных φб.max.
Значения φб.max для ряда xmax даны в таблице на рис. 3.1,ж и 3.5,б.
В рассматриваемом примере:
![]() и можно принять
и можно принять![]() .
.
При ![]()
Для сравнения: нормальная
множительная структура на 12 вариантов 12=3(1)·2(3)·2(6) при ![]() обеспечивает
обеспечивает ![]() , что в
4 раза меньше.
, что в
4 раза меньше.
3.9.6.4 Приводы со сложенной структурой
Привод с нормальной множительной структурой состоит из одной кинематической цепи и число скоростей (ступеней) определяется как произведение чисел скоростей последовательно соединённых групп передач.
Сложенной называется структура многоскоростного привода, состоящая из двух или более кинематических цепей передач, каждая из которых является обычной множительной структурой. Одна из этих цепей – короткая – предназначена для высших скоростей привода, другие – более длинные – для низших скоростей. Общее число скоростей привода определяется как сумма чисел скоростей, обеспечиваемых всеми кинематическими цепями привода. Начало этих цепей, как правило, совпадает.
Структурная формула сложенного привода при двух составляющих структурах имеет вид:
|
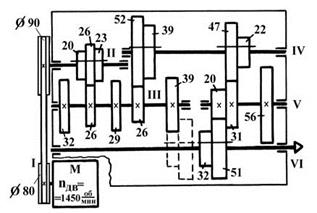
Рис. 3.6. Кинематическая схема коробки скоростей на 15 вариантов со сложенной структурой |
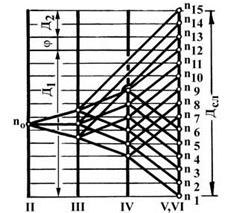
Рис. 3.7. Вариант структурной сетки привода со сложенной структурой по рис. 3.6 |
где zо – число ступеней, обеспечиваемых общей частью слагаемых структур, zт и zс – числа ступеней, обеспечиваемых обособленными частями тихоходной и скоростной кинематических цепей. Примеры сложенных структур: 15 = 3·(4+1), Вариант кинематической схемы коробки скоростей |
для случая 15=3·(4+1), возможная структурная сетка и ДЧВ для неё показаны на рис. 3.6, 3.7 и 3.8.
Одна из слагаемых структур – ![]() – обеспечивает 12 вариантов,
другая
– обеспечивает 12 вариантов,
другая ![]() –
три.
–
три.
Диапазон регулирования привода ![]() .
.
Очевидно (см. рис. 3.7): ![]() при этом
при этом ![]() , как
для обычной множительной структуры, а
, как
для обычной множительной структуры, а ![]() , и
тогда
, и
тогда ![]() .
.
Сложенные структуры, аналогичные
рассмотренной, применяются весьма часто. В них
![]() .
.
|
|
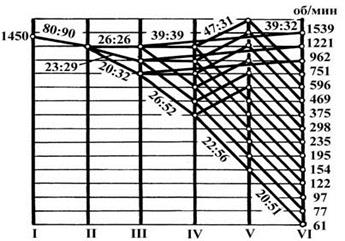
При использовании сложенного привода появляется возможность: - укорочения цепи передач на высоких ступенях скорости, что обеспечивает уменьшение потерь на трение и облегчение разгона и торможения привода; - применения передач на шпиндель различного типа для высоких и для низких ступеней скорости, например, ременной и зубчатой – при разделённом приводе, косозубой и с внутренним зацеплением – в приводах шпинделей крупных станков. Рис. 3.8. Вариант диаграммы частот вращения для привода по рис. 3.6 и 3.7 |
3.9.7 Бесступенчатое регулирование скорости
Бесступенчатое регулирование скорости с помощью двигателей постоянного тока (ДПТ) широко используется в станках с ЧПУ.
|
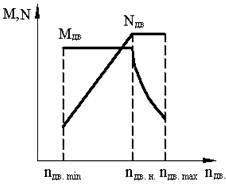
Рис. У.15. График двухзонного регулирования ДПТ |
Применяемые ДПТ имеют двухзонное регулирование (рис. У.15): в диапазоне от минимальной (nдв.min) до номинальной (nдв.н) частоты вращения двигатель работает с постоянным крутящим моментом (Mдв = const) и полной мощности не развивает, а при частотах от номинальной до максимальной (nдв.max) – работает с постоянной мощностью (Nдв = const). Например, если nдв.min, nдв.н и nдв.max составляют соответственно 190, 1200 и 3000 об/мин, то диапазоны регулирования ДПТ будут: - при постоянной мощности Ддв.N= nдв.max/ nдв.н= 2,5; - при постоянном моменте Ддв.M= nдв.н/ nдв.min= 6,3 - полный Ддв.= nдв.max /nдв.min= 15,6 Диапазоны регулирования двигателя в целом и с постоянной мощностью составляют весьма ограниченные величины, гораздо меньшие, чем это требуется в приводах универсальных станков. |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.