





















СОДЕРЖАНИЕ
Введение…………………………………………………………………………….
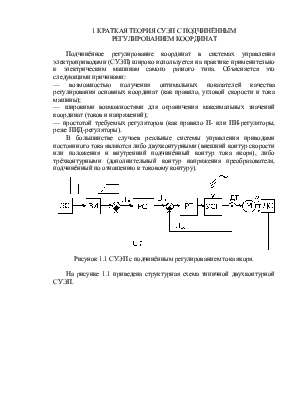
1. Краткая теория СУЭП с подчинённым регулированием координат…………………………………………………………………….
2. Структурный расчёт СУЭП…………………………………………………
Выбор структуры и расчёт параметров СУЭП…………………………
Структура задатчика интенсивности…………………………………...
3. Имитационное моделирование динамических режимов привода……………………………………………………………………….
4. Электрический расчёт избранных функциональных узлов………………
Расчёт задатчика интенсивности………………………………………..
Выбор и расчёт датчика скорости………………………………………
Выбор датчика тока……………………………………………………...
Расчёт формирователей сигналов рассогласования…………………...
Расчёт регулятора тока…………………………………………………..
Реализация тиристорного преобразователя…………………………….
5. Схемотехника СУЭП……………………………………………………......
Заключение……………………………………………………………………...
Библиографический список…………………………………………………….
Приложение……………………………………………………………………..
ВВЕДЕНИЕ
В электроприводе для регулирования его выходных параметров ― скорости, ускорения, положения ― обычно используются обратные связи по скорости, току и напряжению всех известных видов (обратная связь по моменту или усилию двигателя применяется редко из-за отсутствия простых и надёжных датчиков момента и усилия).
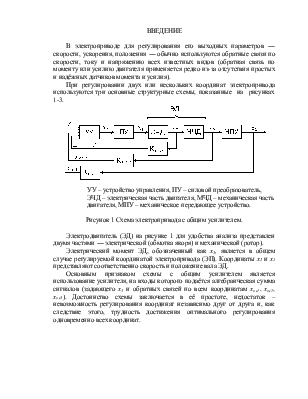
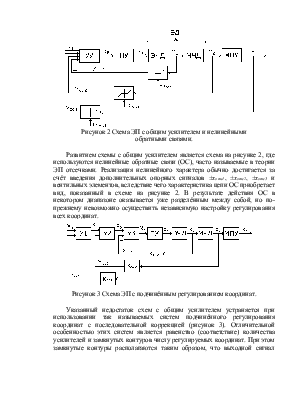
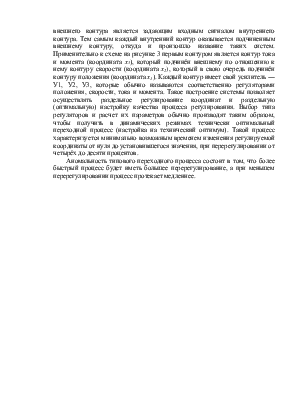
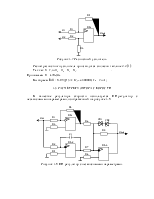
При регулировании двух или нескольких координат электропривода используются три основные структурные схемы, показанные на рисунках 1-3.
УУ – устройство управления, ПУ – силовой преобразователь,
ЭЧД – электрическая часть двигателя, МЧД – механическая часть
двигателя, МПУ – механическое передающее устройство.
Рисунок 1 Схема электропривода с общим усилителем.
Электродвигатель (ЭД) на рисунке 1 для удобства анализа представлен двумя частями ― электрической (обмотка якоря) и механической (ротор).
Электрический момент ЭД, обозначенный как х3, является в общем случае регулируемой координатой электропривода (ЭП). Координаты х2 и х1 представляют соответственно скорость и положение вала ЭД.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.