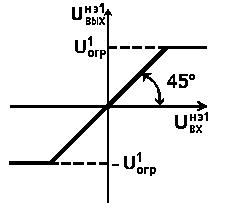
Рисунок 2.3 Амплитудная характеристика НЭ1
Для НЭ1 уровень ограничения:
![]() . (2.9)
. (2.9)
![]() В.
В.
Наличие
НЭ1 позволяет ограничивать нелинейный ток якоря на уровне ![]() .
.
НЭ2 соответствует БОУ на рисунке 2.1. Его амплитудная характеристика показана на рисунке 2.4.
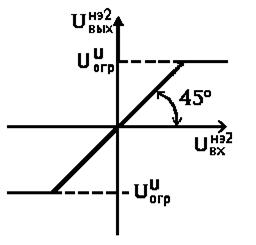
Рисунок 2.4 Амплитудная характеристика НЭ2.
Для НЭ2 уровень ограничения:
![]() . (2.10)
. (2.10)
![]() .
.
Наличие НЭ2 позволяет
ограничивать ![]() (и
(и ![]() )
на уровне
)
на уровне ![]() .
.
2.2 СТРУКТУРА ЗАДАТЧИКА ИНТЕНСИВНОСТИ
Назначением ЗИ является ограничение ускорения, развиваемого приводом в переходных режимах. Структура ЗИ и характер формирования сигнала показаны на рисунке 2.5.
Рисунок 2.5 Структура и сигналы ЗИ.
Динамический режим ЗИ характеризуется неравенством:
![]() . (2.11)
. (2.11)
Практически, для нахождения скорости изменения напряжения берётся неравенство:
![]() . (2.12)
. (2.12)
![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.