где DРмех – механические потери (в лабораторных работах DРмех»0,01×Рн );
с1-коэффициент приведения цепи ротора.
Приведенное активное сопротивление фазы ротора при s=1 [6]
где  -
кратность пускового момента Мп двигателя; кп - кратность
пускового тока Iп двигателя, кп=
-
кратность пускового момента Мп двигателя; кп - кратность
пускового тока Iп двигателя, кп=![]() .
.
Приведенное активное
сопротивление фазы ротора ![]() из-за вытеснения тока
зависит от скольжения и изменяется от
из-за вытеснения тока
зависит от скольжения и изменяется от ![]() до
до ![]() .
.
Поэтому для произвольного s сопротивление r¢2 нужно определять по формуле [6]
![]() .
.
При выполнении заданий к
лабораторным работам ![]() нужно определять для sн:
нужно определять для sн:
![]() .
(4)
.
(4)
Приведенное
индуктивное сопротивление рассеяния ротора ![]() из-за
вытеснения тока также зависит от скольжения и изменяется от
из-за
вытеснения тока также зависит от скольжения и изменяется от ![]() до
до ![]() .
.
В [6] рекомендуется ![]() при s>0,05
о.е. (s> 5 %) вычислять по формуле
при s>0,05
о.е. (s> 5 %) вычислять по формуле
 ,
(5)
,
(5)
а в диапазоне от s»0 до s=5 % (s=0,05 о.е.) принять
постоянным и равным сопротивлению ![]() при s=0,05
о.е.
при s=0,05
о.е.
 .
.
При выполнении заданий к
лабораторным работам №3-5 сопротивление ![]() нужно
вычислять для sн (
нужно
вычислять для sн (![]() ).
).
Для определения ![]() и
и ![]() необходимо
найти суммарное индуктивное сопротивление рассеяния двигателя xs
для граничных случаев. Для s =1
его можно определить (если пренебречь намагничивающим током) по формуле [6]
необходимо
найти суммарное индуктивное сопротивление рассеяния двигателя xs
для граничных случаев. Для s =1
его можно определить (если пренебречь намагничивающим током) по формуле [6]
![]() , (6)
, (6)
где zd1- полное сопротивление двигателя при неподвижном роторе.
 (7)
(7)
Для s»0 суммарное индуктивное сопротивление рассеяния двигателя [6]
![]() =
= ,
(8)
,
(8)
где с1 – коэффициент преобразования.
Решая совместно (6) и (8) , находим, что
 и
и ![]() .
(9)
.
(9)
Однако для изучения переходных процессов более удобной является
Г-образная схема замещения (рис. 3а), в которой намагничивающая цепь вынесена к месту приложения напряжения Ud. Для перехода от Т-образной схемы к Г-об-разной необходимо вычислить коэффициент преобразования [8]
 ,
(10)
,
(10)
где z1-полное сопротивление статора; zm- полное сопротивление цепи намагничивания. В лабораторных работах с1 следует принять равным 1,03.
При изучении статической устойчивости асинхронной нагрузки Г-образная схема замещения обычно упрощается [2]. В схеме не учитываются: коэффициент преобразования с1, в намагничивающей цепи – потери (r0=0) и сопротивление х1, а в цепи рассеяния обмоток - потери в обмотке статора (r1=0) . В цепи намагничивания остается только индуктивное сопротивление хm (рис. 3б).
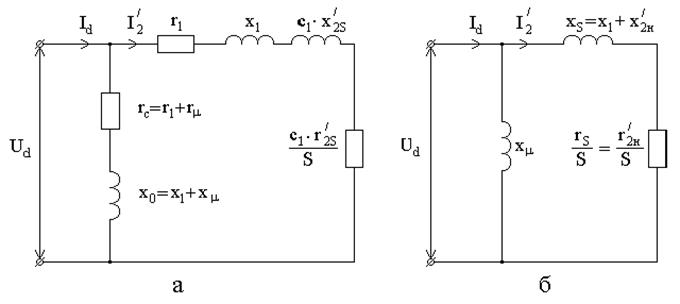
Рис. 3. Г-образная схема замещения асинхронного двигателя: а − полная;
б − упрощенная
Для цепи рассеяния обмоток (для
удобства написания формул) введем обозначения xS
и rS , где xS
равно сумме индуктивных сопротивлений обмоток (![]() ), а rS –приведенному активному сопротивлению ротора (
), а rS –приведенному активному сопротивлению ротора (![]() ). Изменением сопротивлений
). Изменением сопротивлений ![]() и
и ![]() из-за
вытеснения тока ротора с ростом скольжения пренебрегают и считают их
постоянными (в лабораторных работах №3 и №4 они вычисляются при sн). Эти упрощения существенно не изменяют полного
сопротивления двигателя, но позволяют наглядно показать влияние скольжения s на устойчивость нагрузки (в лабораторной работе №5 при
исследовании динамической устойчивости нагрузки влияние скольжения на
сопротивления
из-за
вытеснения тока ротора с ростом скольжения пренебрегают и считают их
постоянными (в лабораторных работах №3 и №4 они вычисляются при sн). Эти упрощения существенно не изменяют полного
сопротивления двигателя, но позволяют наглядно показать влияние скольжения s на устойчивость нагрузки (в лабораторной работе №5 при
исследовании динамической устойчивости нагрузки влияние скольжения на
сопротивления ![]() и
и ![]() учитывается).
учитывается).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.