Устойчивость асинхронного двигателя обычно определяют по характеристикам электромагнитной мощности двигателя Pd=f(s) и мощности тормозного момента производственного механизма Pт=f(s) (рис. 4). Характеристики имеют две точки пересечения а и б, причем в точке а режим устойчивый, так как при возмущении с ростом скольжения s растет и ускоряющая избыточная мощность двигателя, поэтому скорость двигателя начинает возрастать, скольжение - уменьшаться и первоначальный режим восстанавливается. А в точке б возникает тормозящая избыточная мощность, скольжение продолжает расти и двигатель останавливается. Точка а будет рабочей точкой двигателя, которой соответствует мощность Р0 и скольжение s0.
Если напряжение на шинах снижается, то уменьшается максимальная мощность двигателя Pmax и рабочая точка смещается в сторону увеличения скольжения.
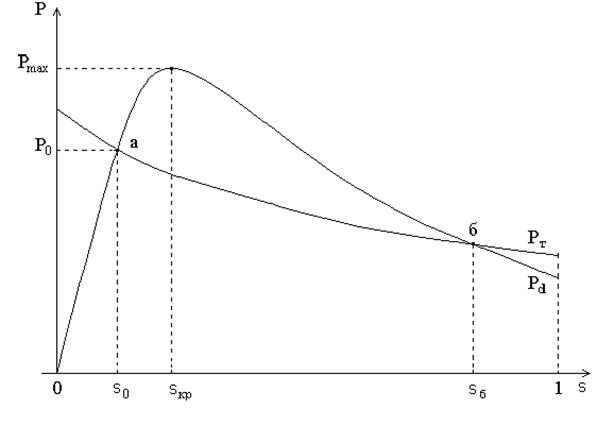
Рис. 4. Характеристики асинхронного двигателя и нагрузки
Область устойчивой работы асинхронного двигателя при снижении напряжения на двигателе зависит от вида характеристики мощности тормозного момента PT =f (s).
Если характеристика PT = const, то критерий устойчивости двигателя имеет вид
 , (11)
, (11)
т.е. предельным режимом, с точки зрения устойчивости, является точка sкр, где характеристика Pd =f (s) достигает максимального значения.
Если характеристика мощности тормозного момента PT =f (s) имеет падающий характер, то критерием статической устойчивости двигателя является положительный знак избыточной мощности (dP=dPd-dPт) при увеличении скольжения s , т.е. условие [4]
 .
(12)
.
(12)
В этом случае характеристика PT =f (s) имеет отрицательную производную
![]() и устойчивая работа
двигателя возможна в некоторой области за максимумом функции Pd =f (s) при
и устойчивая работа
двигателя возможна в некоторой области за максимумом функции Pd =f (s) при  .
На рис. 5 приведены характеристики асинхронного двигателя и нагрузки для
предельного случая. При снижении напряжения на двигателе до Uпред
обе характеристики будут иметь только одну общую точку при скольжении sпред , которое лежит в диапазоне 1> sпред> sкр .
.
На рис. 5 приведены характеристики асинхронного двигателя и нагрузки для
предельного случая. При снижении напряжения на двигателе до Uпред
обе характеристики будут иметь только одну общую точку при скольжении sпред , которое лежит в диапазоне 1> sпред> sкр .
В курсах “ Электрические машины ” и “ Электропривод ” для асинхронных двигателей обычно строят механические характеристики моментов, а не мощностей ( Md =f (s) и MT = f (s)) .
В лабораторных работах также исследуются характеристики моментов, только построенные в относительных единицах ( md =f (s) и mT = f (s) ).
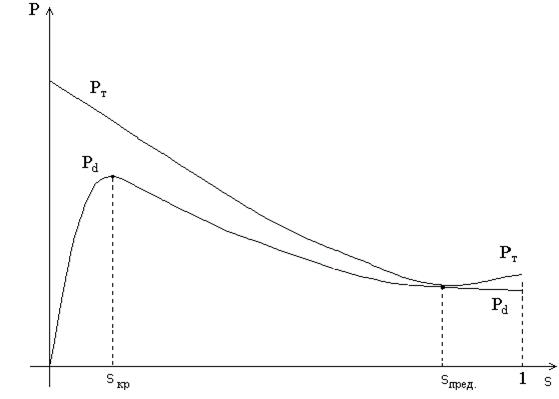
Рис. 5. Характеристики асинхронного двигателя и нагрузки для предельного случая (Uпред)
На рис. 6 приведены два вида механических характеристик момента сопротивления нагрузки, построенных в относительных единицах [5]:
а) mT = const ;
б) mT = mтр + (кЗ – mтр)×(1-s)g , (13)
где mтр
– начальный момент трения при s=1; кЗ -
коэффициент загрузки двигателя ( ); g- показатель степени, характеризующий
механизм.
); g- показатель степени, характеризующий
механизм.
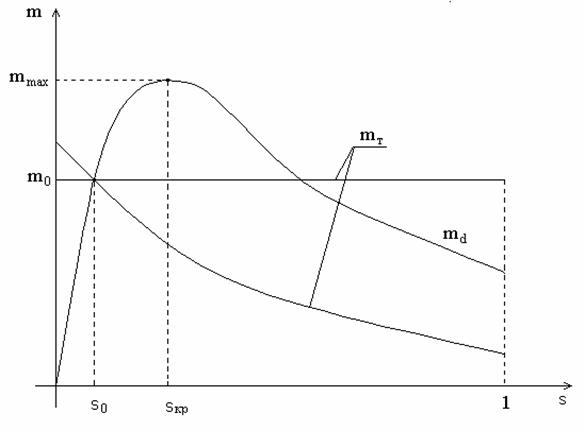
Рис. 6. Механические характеристики асинхронного двигателя и нагрузки
Показатель g принимает значения от 0 до 3. Характеристики с постоянным моментом сопротивления (g=0) имеют транспортеры, шаровые мельницы; линейную зависимость (g=1) имеет система двигатель-генератор; показатель g=2 – у вентиляторов, насосов, а в некоторых случаях показатель степени может дости-
гать g=3.
Механическую характеристику асинхронного двигателя в относительных единицах с достаточной для практических расчетов точностью можно построить по формуле [6]
 , (14)
, (14)
где q-параметр, он определяется по формуле
 .
.
Причем при s<sкр следует принять q=0 и формула (14) преобразуется в формулу Клосса [5]:
 .
(15)
.
(15)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.