- механические характеристики двигателя для Uпред;
- зависимости Uпред =f (g) , Sпред =f (g);
е) основные результаты III этапа работы:
- зависимости m max =f (Ud) и m 0 =f (Ud);
- зависимости Qm =f (Ud), Qs =f (Ud), Q = f (Ud) и Pd =f (Ud);
- механическая характеристика для Uкр;
- зависимость Uкр =f (g) и кзап = f (g);
ж) выводы по работе.
ЛАБОРАТОРНАЯ РАБОТА №4
ИССЛЕДОВАНИЕ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ АСИНХРОННОЙ НАГРУЗКИ ПРИ ПИТАНИИ ОТ ИСТОЧНИКА СОИЗМЕРИМОЙ МОЩНОСТИ
Цель работы. Познакомиться с критериями устойчивости и методикой
исследования устойчивости асинхронной нагрузки на ЭВМ.
Исследования, проведенные в лабораторной работе №3, показали, что асинхронный двигатель при питании его от шин бесконечной мощности может опрокинуться лишь при снижении напряжения на шинах на 35-40 %. Однако такие снижения напряжения в установившихся режимах работы электрических систем не имеют места, и, следовательно, нужно искать другие факторы, способствующие опрокидыванию двигателей. Таким фактором является внешнее по отношению к двигателю индуктивное сопротивление системы xC (рис. 10).
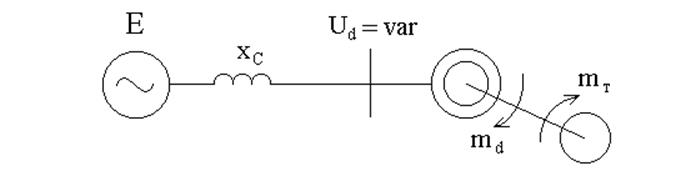
Рис. 10. Исследуемая схема включения двигателя
В мощной электрической системе сопротивление системы xC невелико по сравнению с сопротивлением двигателя zd, поэтому характеристики двигателя можно строить, не считаясь с потерей напряжения на xC. Если же речь идет о группе асинхронных двигателей, то сопротивления системы xC и эквивалентного двигателя zd соизмеримы, и напряжение на выводах двигателя из-за падения на xC будет значительно ниже, чем э.д.с. генератора Е.
Поэтому в лабораторной работе рассмотрена схема (рис.10), которая состоит из группы асинхронных двигателей, замененных эквивалентным двигателем, и эквивалентного генератора соизмеримой мощности. На рис.11 приведена схема замещения исследуемой цепи, в которой эквивалентный двигатель представлен упрощенной Г-образной схемой замещения.
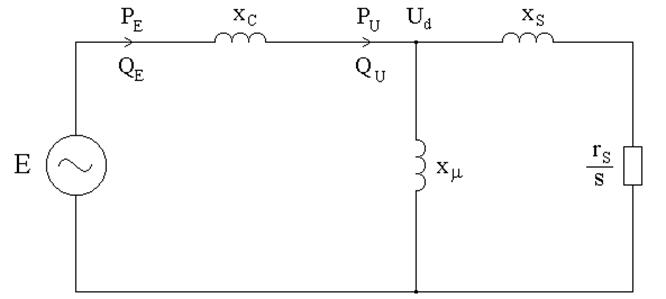
Рис. 11. Схема замещения исследуемой цепи
Условия нарушения устойчивости (опрокидывания) эквивалентного двигателя в исследуемой схеме существенно отличаются от случая, когда двигатель питается от шин бесконечной мощности.
Во-первых, в этой схеме сопротивления xC и zd соизмеримы и напряжение на выводах двигателя значительно ниже, чем э.д.с. Е, из-за падения напряжения на сопротивлении xC и уменьшается с увеличением скольжения s [2].
Во-вторых, критическое скольжение эквивалентного двигателя определяется по формуле
и оказывается намного меньше, чем критическое скольжение двигателя, подключенного к шинам бесконечной мощности (sКР=rS/xS). Поэтому и опрокидывание двигателя в схеме рис.10 происходит при меньшем снижении напряжения.
Обычно схема замещения (рис.11) упрощается [3, 4], цепь намагничивания выносится к источнику и получаются простые расчетные формулы. Применение ЭВМ позволяет провести исследование статической устойчивости для схемы без переноса цепи намагничивания (рис.11) . Однако при этом усложняются расчетные формулы. Напряжение на двигателе Ud при известной э.д.с. генератора Е можно найти из векторной диаграммы для исследуемой цепи (рис.12) по формуле
 ,
(27)
,
(27)
где PE и QE –активная и реактивная мощности, выдаваемые генератором.
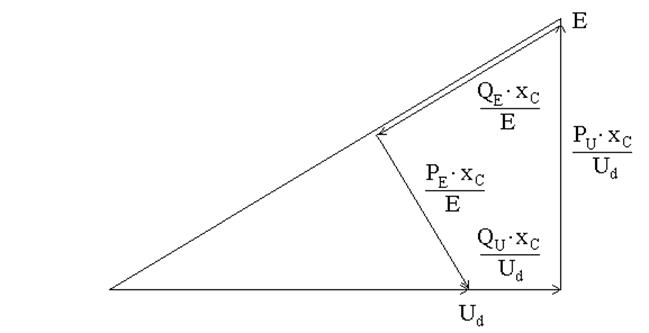
Рис. 12. Векторная диаграмма исследуемой цепи
Причем активная мощность генератора PE равна активной мощности, потребляемой двигателем PU:

а реактивная мощность, выдаваемая генератором: QE=QU +DQ,
где QU –реактивная мощность, потребляемая двигателем, состоящая из мощности, потребляемой цепью намагничивания Qm и цепью рассеяния QS:
 ;
;
DQ- потери реактивной мощности в реактивном сопротивлении сети хС:
 .
.
Э.д.с. Е, при известном напряжении на двигателе Ud, можно определить по формуле
 . (28)
. (28)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.