б) списать табличные данные для построения
зависимостей ![]() и
и  для устойчивого
и не устойчивого режимов;
для устойчивого
и не устойчивого режимов;
в) оценить полученное значение ![]() .
.
5.
Выполнить II этап работы
(Построение зависимости ![]() ):
):
а) для четырёх значений мощности ![]() (табл.3) подбором (с точностью до трёх
знаков после запятой) определить предельное время отключения
(табл.3) подбором (с точностью до трёх
знаков после запятой) определить предельное время отключения ![]() ;
;
б) построить зависимость ![]() ;
;
в) оценить полученные результаты.
6.
Выполнить III этап работы
(Построение зависимости ![]() ):
):
а) для двух значений ![]() (табл.4)
подбором (с точностью до трёх знаков
(табл.4)
подбором (с точностью до трёх знаков
после запятой) определить предельное время
отклонение ![]() ;
;
б) по трём точкам построить зависимость ![]() ( третье зна-
( третье зна-
чение ![]() нужно взять для
нужно взять для ![]() о. е., полученное при выполнении
о. е., полученное при выполнении
n. 4);
в) оценить полученные результаты.
7. Составить отчет, который должен содержать:
а) название и цель лабораторной работы;
б) исследуемую схему и исходные данные;
в) расчет параметров режимов;
г) угловые характеристики мощности ![]() =
= ![]() для
предельного слу-
для
предельного слу-
чая (показать площадки ускорения и торможения);
д) зависимости ![]() и
и  для устойчивого и неустойчивого режимов;
для устойчивого и неустойчивого режимов;
е) зависимость ![]() ;
;
ж) зависимость ![]() ;
;
з) вывод.
Часть 2. Исследование статической и динамической устойчивости
асинхронной нагрузки
Общие теоретические положения к лабораторным работам № 3-5
Асинхронные двигатели обычно составляют основную часть нагрузки электрических систем и оказывают непосредственное влияние на устойчивую работу всей системы. В определенных условиях работа самих двигателей оказывается неустойчивой. Так, при значительном снижении напряжения на выводах двигателей происходит их опрокидывание и они останавливаются.
В лабораторных работах исследуется устойчивость асинхронной нагрузки. Исследования проводятся для общей схемы, изображенной на рис.1, в которой асинхронный двигатель мощностью Рd вращает производственный механизм с тормозным моментом мощностью PT и питается от независимого источника, имеющего э.д.с. Е, через реактивное сопротивление хС.
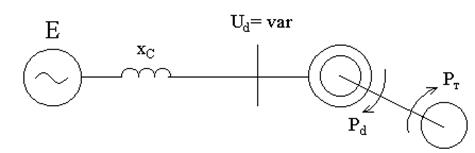
Рис. 1. Исследуемая схема
При изучении режимов работы асинхронного двигателя на ЭВМ двигатель представляется схемой замещения. Реальные физические процессы, происходящие в двигателях, хорошо отражаются Т-образной схемой замещения [8], приведенной на рис. 2.
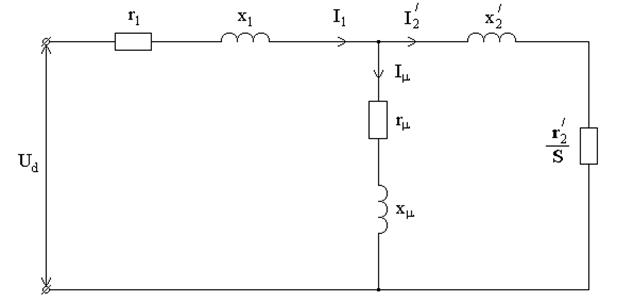
Рис. 2. Т-образная схема замещения асинхронного двигателя
Здесь введены
следующие обозначения: r1 и x1 – активное и индуктивное сопротивления статора;
![]() и
и ![]() –
приведенные активное и индуктивное сопротивления ротора; rm и xm -активное и индуктивное
сопротивления намагничивающей цепи; I1 и Im
- токи статора и намагничивающей цепи;
–
приведенные активное и индуктивное сопротивления ротора; rm и xm -активное и индуктивное
сопротивления намагничивающей цепи; I1 и Im
- токи статора и намагничивающей цепи; ![]() –приведенный
ток ротора; s- скольжение или относительная разность
скоростей вращения поля w0 и
ротора w
–приведенный
ток ротора; s- скольжение или относительная разность
скоростей вращения поля w0 и
ротора w
(s=
 ).
).
Параметры схемы замещения можно определить по паспортным данным двигателя [6].
Параметры намагничивающей цепи можно найти из следующих соображений. Магнитный поток при изменении скольжения от s»0 до sн практически не изменяется, поэтому ток Im можно оценить по номинальному режиму [6].
 ,
,
где cosjн и sн –номинальные значения косинуса и скольжения; Iн – номинальный ток двигателя; sкр – критическое скольжение, соответствующее максимальному моменту Мmax на валу двигателя. Ток Iн определяется по формуле
 ,
,
где hн – номинальный к.п.д., о.е.; Рн – номинальная мощность, Вт; Uн – номинальное напряжение, В.
Критическое скольжение
![]() , (1)
, (1)
где  -
кратность максимального момента двигателя; М н – номинальный момент;
M max – максимальный момент.
-
кратность максимального момента двигателя; М н – номинальный момент;
M max – максимальный момент.
Активным сопротивлением цепи намагничивания можно пренебречь, так как
rm << xm [6] , и тогда индуктивное сопротивление этой цепи
 .
(2)
.
(2)
Активное сопротивление статора r1 можно принять равным приведенному активному сопротивлению ротора s»0 [6]:
 (3)
(3)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.