 Для определения
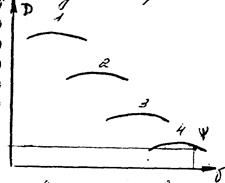
Для определения ![]() на участке дороги,
характеризующимся постоянным коэффициентом ψ надо по оси ординат отложить ψ в
том же масштабе, что и Д, и провести прямую, параллельную оси x.
АНАЛИЗ: 1.Если линия ψ пересекает кривую Д, то в этой точке
на участке дороги,
характеризующимся постоянным коэффициентом ψ надо по оси ординат отложить ψ в
том же масштабе, что и Д, и провести прямую, параллельную оси x.
АНАЛИЗ: 1.Если линия ψ пересекает кривую Д, то в этой точке ![]() , т.к. Д= ψ. 2. Если Д проходит выше ψ, то
равномерное движение при открытой дроссельной заслонке невозможно, т.к.
происходит разгон авто. Чтобы обеспечить равномерное движение, нужно прикрыть
заслонку. 3. Если ψ > Д, то движение с постоянной скоростью невозможно –
торможение. Также с помощью динамической характеристики определяется ψ при
движении авто с постоянной скоростью. Для этого по динамической характеристике
находим величину Д по указанной скорости следует ψ. Также, если известен f, то определив ψ, можно определить
, т.к. Д= ψ. 2. Если Д проходит выше ψ, то
равномерное движение при открытой дроссельной заслонке невозможно, т.к.
происходит разгон авто. Чтобы обеспечить равномерное движение, нужно прикрыть
заслонку. 3. Если ψ > Д, то движение с постоянной скоростью невозможно –
торможение. Также с помощью динамической характеристики определяется ψ при
движении авто с постоянной скоростью. Для этого по динамической характеристике
находим величину Д по указанной скорости следует ψ. Также, если известен f, то определив ψ, можно определить ![]() из
выражения:
из
выражения: ![]() .
.
Вопрос 11: Коэффициенты скольжения и буксования. Тяговая динамичность полноприводного автомобиля. Наличие 4-х ведущих колес позволяет реализовывать для сцепления с почвой весь или почти весь вес автомобиля, тяговая динамичность автомобиля 4х4 во многом зависит от того, как осуществляется привод к ведущим колесам. Применяют 2 основных типа привода: 1. Блокируемый; 2.Дифференциальный.
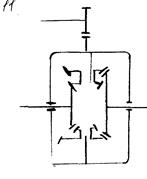
В приводе а) задние и передние оси жестко соединены между собой через
раздаточную коробку передач, вследствие этого между их угловыми скоростями
существует определенное неизменное соотношение. В приводе б) в раздаточной
коробке расположен межосевой дифференциал (несимметричный). Под действием
дифференциального эффекта между угловыми скоростями обеих осей могут устанавливаться
в процессе работы различные, хотя и, подчиненные одному определенному закону
соотношения, вследствие изменяемого характера кинематические связи между осями
распределяется различным крутящим момент. В автомобилях с блокированным
приводом ведущих осей почти всегда существуют некоторые кинематические
несоответствия (рассогласование). При прямолинейном движении оно выражается в
том, что окружные скорости передних и задних колес могут несколько различаться,
в то время как оси жестко связаны остовом, они должны двигаться с одинаковыми
поступательными скоростями. Обеспечить идентичность окружной скорости
практически невозможно, т.к. размеры радиусов колес могут отличаться от своих
значений в зависимости от различных факторов, но особенно существенно в результате
изменения действующих на колеса норм нагрузок в соответствии с углами работы.
На поворотах кинематическое несоответствие обуславливают еще и тем, что при криволинейном
движении каждая из осей должна проходить разные пути между тем, как обе оси, будучи
заблокированными, стремятся двигаться с одинаковыми поступательными скоростями.
Рассмотрим прямолинейное движение с блокированным приводом по ровной дороге при
наличии некоторой рабочей разности между окружными скоростями передних и
задних колес. Выровнять поступательные скорости обеих ведущих осей возможно
только при скольжении или буксовании колес. Условие равенства поступательной
скорости обеих ведущих осей имеет вид: ![]() (1),
где
(1),
где ![]() - для той оси, скорость которой больше.
Колеса первой оси называют забегающими, колеса задней оси – отстающими.
Величина δ характеризует как буксование, так и скольжение.
- для той оси, скорость которой больше.
Колеса первой оси называют забегающими, колеса задней оси – отстающими.
Величина δ характеризует как буксование, так и скольжение.  - коэффициент кинематического
несоответствия передних и задних колес. Между буксованием забегающих и
отстающих колес существует зависимость, которая на основании условия (1)
выразиться следующим образом:
- коэффициент кинематического
несоответствия передних и задних колес. Между буксованием забегающих и
отстающих колес существует зависимость, которая на основании условия (1)
выразиться следующим образом:  . Здесь величина
. Здесь величина ![]() имеет положительное значение, т.к.
забегающие колеса всегда работают с некоторым буксованием, буксование
имеет положительное значение, т.к.
забегающие колеса всегда работают с некоторым буксованием, буксование ![]() может быть величиной положительной,
отрицательной и 0. Если
может быть величиной положительной,
отрицательной и 0. Если ![]() < 0, то отстающие
колеса двигаются со скольжением. Если
< 0, то отстающие
колеса двигаются со скольжением. Если ![]() = 0 –
катятся без скольжения и буксования. Если
= 0 –
катятся без скольжения и буксования. Если ![]() > 0 –
отстающие колеса работают с буксованием, однако значение буксования
> 0 –
отстающие колеса работают с буксованием, однако значение буксования ![]() < 0. Наилучшие тяговые показатели 4х4
возможны когда
< 0. Наилучшие тяговые показатели 4х4
возможны когда ![]() , т.е. передние и задние колеса
работают с одинаковым буксованием и их сцепные свойства используются в равной
степени, наиболее отрицательно влияет на тяговые показатели скольжение
отстающих колес, здесь ведущими фактически остаются 2 колеса, т.к. скользящие
колеса становятся ведомыми. Паразитная мощность возникает при движении 4х4 по
твердым поверхностям, когда буксование невелико. И на поворотах, причем, чем
меньше радиус поворота, тем больше паразитная мощность. Паразитная мощность не
возникает в случае буксования или проскальзывания колес (движение по
бездорожью). Обычно расчетное значение буксования задних колес соответствует
началу включения муфты свободного хода и выбирается в пределах 4-6%.
, т.е. передние и задние колеса
работают с одинаковым буксованием и их сцепные свойства используются в равной
степени, наиболее отрицательно влияет на тяговые показатели скольжение
отстающих колес, здесь ведущими фактически остаются 2 колеса, т.к. скользящие
колеса становятся ведомыми. Паразитная мощность возникает при движении 4х4 по
твердым поверхностям, когда буксование невелико. И на поворотах, причем, чем
меньше радиус поворота, тем больше паразитная мощность. Паразитная мощность не
возникает в случае буксования или проскальзывания колес (движение по
бездорожью). Обычно расчетное значение буксования задних колес соответствует
началу включения муфты свободного хода и выбирается в пределах 4-6%.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.