































СРВ – автоматические/автоматизированные системы, управляющее воздействие которых вырабатывается/вычисляется в промежутке времени между двумя соседними порциями информации с объекта управления (ОУ).
Функцией АСУ ТП называют совокупность действий, направленных на достижение частной цели управления. Отличительной особенностью функций является их законченность с технологической точки зрения, т.е. функция включает: получение информации из вне, её обработку и выдачу результатов так же во внешнюю среду.
Для каждой функции реализуется полный набор определенных операций.
Технологический процесс – это совокупность трех действий: накопление, переработки и транспортировки над 3-мя субстанциями: веществом, энергией и информацией.
В зависимости от вида субстанции различают:
· информационные процессы (процессы обработки данных)
· технологические процессы (процессы энергии и вещества)
Функции программно-технических комплексов.
Основные функции: (располагаются по мере усложнения)
1. измерение
2. контроль
3. регулирование
4. управление
5. оптимизация
6. адаптация
Функции оперативного управления:
1. отображение
2. регистрация
3. сигнализация
4. принятие решений
5. ручное управление
Вспомогательные функции:
1. самодиагностика
2. реконфигурация
3. резервирование
4. рестарт
5. передача данных
6. контроль времени
Объекты реального времени делятся на два класса: дискретные и непрерывные процессы (рассматриваются за определенный промежуток времени).
Дискретные процессы – такие процессы, для которых можно определить точный момент начала и окончания производственного цикла / технологического действия.
Непрерывные процессы – такие процессы характеристики, состояния которых изменяются непрерывно во времени и по множеству значений этих параметров в некоторых пределах.
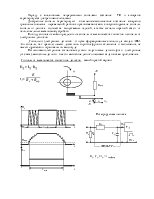
Самая простая схема управления
Измерительные преобразователи/датчики
|
устройства, преобразующие одну величину в другую
yк = const значение уставки;
у » yк ;
у Î U;
ОС – обратная связь должна быть отрицательной, что бы система была устойчивой.
Для управления обязательно должны быть ресурсы, т.к. нет ресурсов нет и управления.
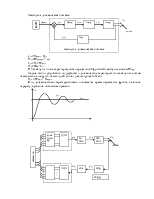
Усложненная схема управления
Условия, при которых система устойчива.
Условия устойчивости системы управления на описательном уровне является необходимость воздействовать на объект управления в направлении, обратном изменению выходной координаты (ООС – усиление).
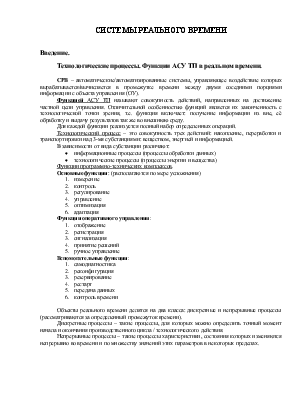
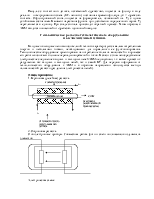
Практически все производственные системы стоятся на основе автоматизированных систем. Большинство современных систем управления реального времени состоят из комплекса, образующегося посредством вычислительных систем и человека, выступающего в качестве диспетчера, оператора и т.д.
P – энергия,
Q – материальные потоки,
Y – выходной продукт,
Z – состояния технологических агрегатов,
D – датчики.
I – замкнутый контур управления
II – замкнутый контур управления
Результатом вычисления в реальном времени является управляющие воздействие на объект/процесс.
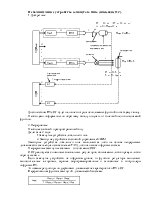
Дисплей – устройство отображения информации.
Современные системы управления (СУ) производственными процессами состоят из двух контуров управления - автоматического управления и контура автоматизированного управления.
Первый контур включает в себя технологический объект как источник информации, комплекс датчиков, вычислительный комплекс и исполнительное устройство воздействия на объект.
Второй контур кроме выше названного включает устройство отображения оператора (одного или нескольких), устройство ввода.
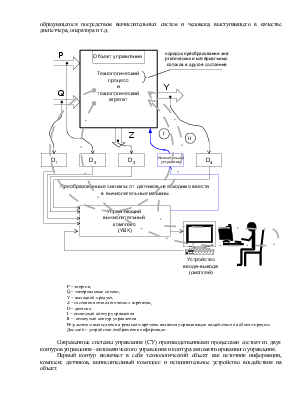
На входе неэлектрический сигнал, на выходе – электрический.
Каждый из датчиков имеет свою зависимость выходных сигналов от входа.
ei = fi(Zi); ei=KDi*Zi , где KDi - линейное преобразование.
Каждый из датчиков характеризуется либо коэффициентом К, либо своей функцией f.
УВК – управляющий вычислительный комплекс – состоит из нескольких вычислительных машин (ВМ)
ВМ – машина последнего действия
КАС – коммутатор аналоговых сигналов
КАС – это внешнее устройство, управляемое ВМ (устройство вывода).
По программе в данный момент КАС должна подключить один из входов к своему выходу.
Контроллер является преобразующим электронным устройством, левая часть которого характерно отображает данное внешнее устройство (КАС), правая часть характерна для процессора, с которым работает данное внешнее устройство.
Основные функции контроллера:
а) со стороны внешнего устройства (ВУ):
· принять сигналы/передать на него
б) со стороны шины:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.