В комплект регуляторов МЗТА помимо основных блоков (ИБ и ЭБ) входят вспомогательные блоки:
– электронный дифференциатор (для получения ПИД-закона);
– размножитель сигналов (для подключения нескольких потребителей);
– электронный следящий прибор (для согласования работы сервопри-водов);
– электронный корректирующий прибор (ЭКП), представляющий со-бой регулятор в целом, но вместо ИМ – электронный интегратор. Этот при-бор может использоваться при построении каскадных систем регулирования, которые будут рассмотрены ниже.
Функциональная схема системы приведена на рис. 44:
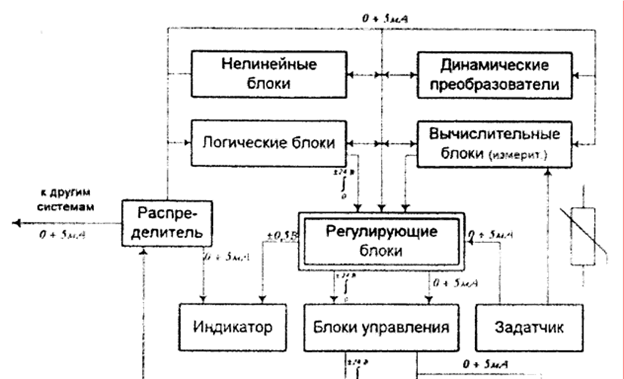
Динамические преобразователи – осуществляют дифференцирование и интегрирование сигналов, а также формируют другие типы корректирую-щего воздействия.
Нелинейные блоки – обеспечивают ограничение сигнала по верхнему и нижнему уровню и формируют типовые нелинейные характеристики.
Логические блоки – обеспечивают аналого-дискретное преобразова-ние сигнала, поиск его экстремума.
Вычислительные блоки осуществляют математические операции: сложение, вычитание, умножение, деление, возведение в квадрат, извлечение корня. Блок, выполняющий вычитание, играет роль измерительного блока.
Регулирующий блок представлен в двух вариантах: релейный и ана-логовый.
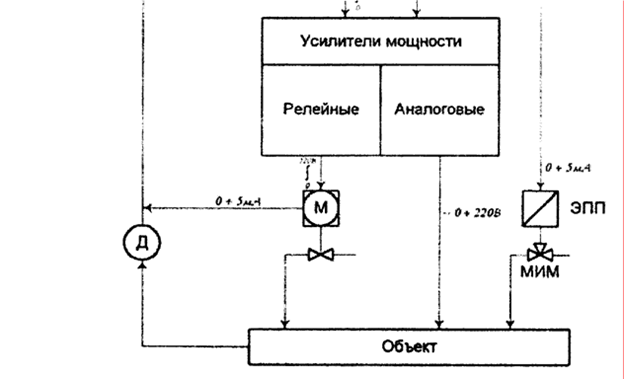
Релейный регулирующий блок – реализует базовый ПИ-закон регу-лирования и пульсирующий режим работы регулятора, управляет через ре-лейный усилитель мощности исполнительным механизмом (М) постоянной скорости. Для реализации ПИД-закона необходимо использовать динамиче-ский преобразователь; П-закон можно получить, охватив исполнительный механизм жесткой обратной связью.
Аналоговый регулирующий блок – формирует базовый ПИД-закон, управляет через электропневматический преобразователь (ЭПП) пропорцио-нальным мембранным исполнительным механизмом (МИМ).
Блоки управления – обеспечивают безударный переход с автоматиче-ского регулирования на режим дистанционного управления и обратно.
Усилители мощности: релейный и аналоговый.
Аналоговый усилитель мощности позволяет управлять электрона-гревом объекта, минуя исполнительные механизмы.
Задатчики: пассивный – резисторный, активный – токовый.
Индикатор – показывает сигнал рассогласования и уровень регули-рующего воздействия.
Распределитель – направляет сигналы датчика (Д) и исполнительно-го механизма (М) по необходимым каналам, в том числе другим системам для реализации каскадного регулирования.
На схеме показан характер электрических сигналов, используемых для связи отдельных блоков.
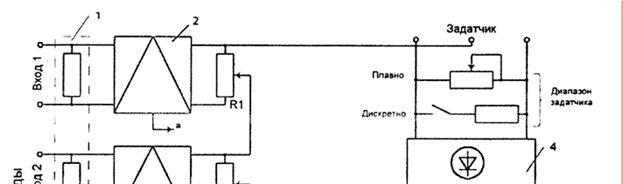
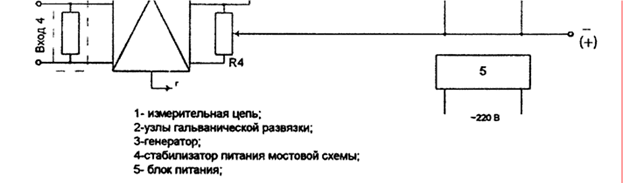
В измерительной цепи 1 токовые входные сигналы преобразуются в унифицированные напряжения.
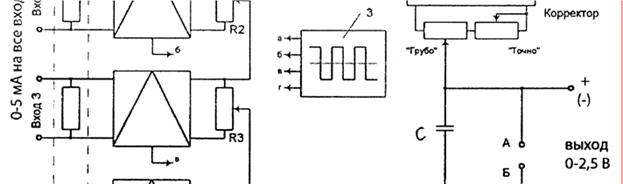
Узлы гальванической развязки 2 (трансформатор – модулятор – демо-дулятор) – обеспечивают направленную передачу сигнала. Они питаются от генератора 3, вырабатывающего несущую частоту 10 кГц.
Потенциометры чувствительности R1÷R4, включенные последовательно, обеспечивают суммирование сигналов по четырем входам с необходимыми весовыми коэффициентами.
В мостовую схему на выходе блока включены реостатные задатчик и корректор. Существует возможность менять диапазон задатчика дискретно, и плавно. Можно менять сигнал корректора («грубо» и «точно»).
Конденсатор С на выходе блока обеспечивает сглаживание пульсаций сигнала. Блок питается от источника напряжения 5.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.