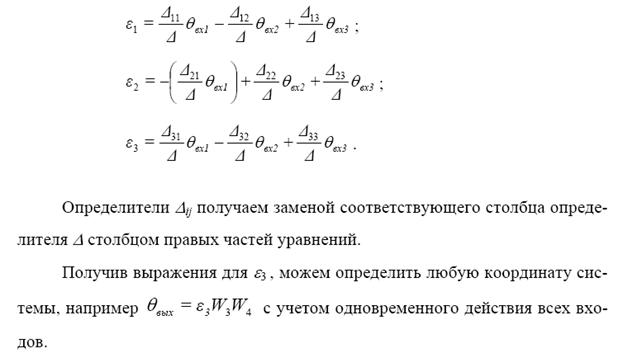
Компенсация влияния перекрестных связей
При отсутствии в объекте перекрестных связей двухконтурную систему можно рассматривать как две одноконтурных независимо работающих системы, разделив объект на два. Но если в объекте существуют перекрест-ные связи, что встречается довольно часто, то простейшая схема с независи-мо работающими регуляторами не дает хороших результатов по динамике. Примером наличия перекрестных связей могут послужить концентрация и уровень красильного раствора в плюсовке, влияющие друг на друга (доливая воду – изменяем концентрацию, доливая подкрепляющий раствор – изменяем уровень). Тогда возникает задача в компенсации перекрестных связей.
Для компенсации влияния перекрестных связей в систему вводятся до-полнительные контуры с корректирующими звеньями (КЗ). В зависимости от подключения корректирующих звеньев компенсация перекрестных связей бывает статическая и динамическая.
Статическая компенсация перекрестных связей
Пример статической компенсации приведен на рис. 65:
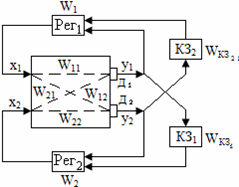
Рис. 65. Схема статической компенсации перекрестных связей
Корректирующие звенья здесь подключаются к выходу датчика, что является недостатком данной схемы, т.к. датчик нагружается двумя потреби-телями и может давать погрешности.
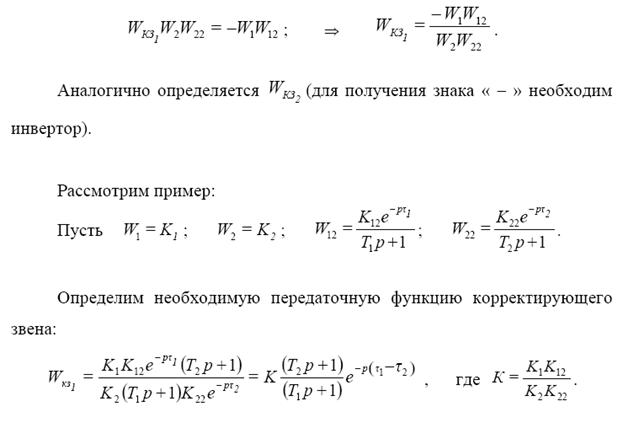
При 2τ>τ1 – получим звено с запаздыванием.
При 2τ<τ1 – получим звено с опережением.
При 2τ=τ1 – получим звено первого порядка без запаздывания.
Во всех трех случаях имеем апериодическое звено с введением произ-водной. В первом и третьем случаях звено реализуется достаточно просто даже в аналоговом варианте. Во втором случае аналоговая реализация звена затруднительна, но в цифровом регуляторе решается без проблем.
Динамическая компенсация перекрестных связей
Пример динамической компенсации приведен на рис. 66:
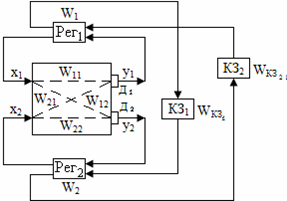
Рис. 66. Схема динамической компенсации перекрестных связей
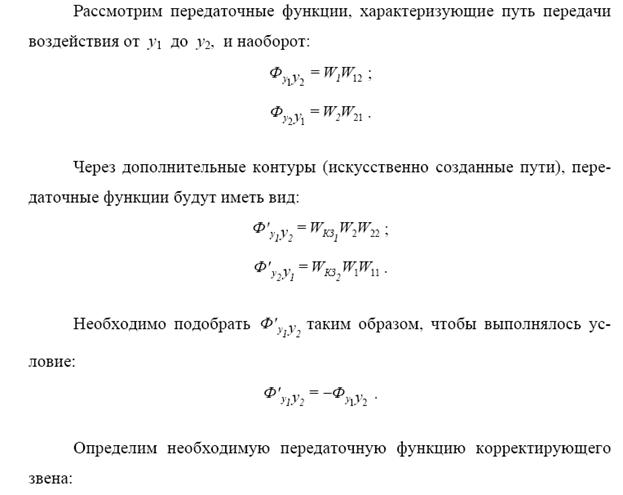
Корректирующие звенья здесь подключаются к выходу регулятора, а значит, сразу получают достаточно мощный сигнал регулирующего воздействия. Динамическая компенсация перекрестных связей является более удачным вариантом для практического осуществления.
Каскадные САР
Необходимость в каскадных системах возникает, в частности, тогда, когда инерционность контура регулирования соизмерима с периодом изменения возмущающего воздействия f (где f – некая случайная функция времени). Замкнутая САР с действующим на объект возмущением приведена на рис. 67:
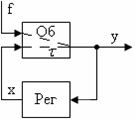
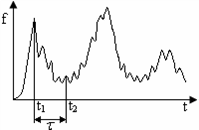
Рис. 67. Замкнутая САР с действующим на объект возмущением
Например, регулятор получил сигнал датчика в момент времени t1 , но соответствующее регулирующее воздействие (х) поступило в объект в мо-мент t2=t1+τ, когда возмущение, вредное влияние которого необходимо ком-пенсировать, существенно изменилось. В этом случае регулятор работает как бы невпопад и может только ухудшить процесс в объекте.
Возникает необходимость в каскадной САР.
Каскадная система предполагает, что кроме основного контура регули-рования строятся вспомогательные (дополнительные) контуры, или каскады, помогающие стабилизировать систему. Рассмотрим некоторые варианты до-полнительных каскадов:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.