Если h = h0 – срабатывает реле К1, но клапан остается открытым.
Если h = h1 – срабатывает реле К2, а значит и реле К3, клапан закрыва-ется, подачи нет, уровень жидкости понижается.
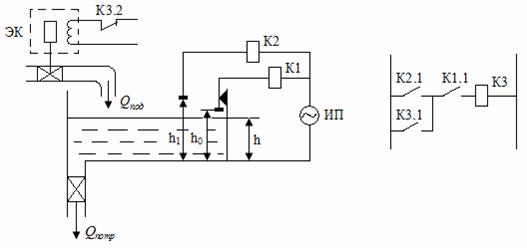
Рис. 26. САР с двумя датчиками уровня
Если h0 < h < h1 – реле К2 выключается, но остается включенным реле К3, клапан закрыт.
Если h < h0 – реле К1 и К3 отключаются, клапан открывается.
Статическая характеристика регулятора приведена на рис. 27:
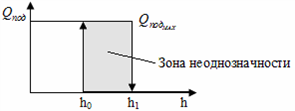
Рис. 27. Статическая характеристика регулятора с двумя датчиками уровня
Статическая характеристика регулятора имеет зону неоднозначности (возврата), т.е. значение подQ (ноль либо МАХподQ) в промежутке между h0 и h1, определяется тем, с какой стороны система в нее входит.
Если пренебречь запаздыванием системы в реле и клапане, то получим процесс, приведенный на рис. 28:
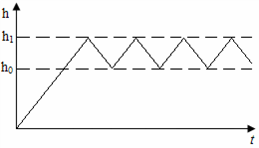
Рис. 28. Процесс регулирования в системе с двумя датчиками уровня
В этом случае амплитудой и частотой автоколебаний мы можем управлять, меняя ширину коридора между h0 и h1.
Использование в системе элемента с трехпозиционной релейной харак-теристикой весьма привлекательно, т.к. позволяет простыми средствами обеспечить большой коэффициент усиления. Однако наличие такого элемен-та в системе приводит к ухудшению ее динамического качества (снижению быстродействия, увеличению колебательности), что мы видели в системах трехпозиционного регулирования. Есть возможность преодолеть этот недос-таток, охватив релейный элемент отрицательной обратной связью.
Рассмотрим пример (рис. 34):
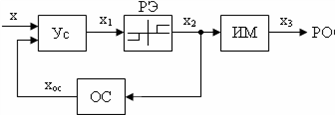
Рис. 34. Схема охвата релейного элемента обратной связью
Рассмотрим передаточные функции линейных звеньев:
Усилитель (Ус): усусK=W (идеальный усилитель);
Исполнительный механизм (ИМ): PK=Wимим;
Используем интегрирующую обратную связь (ОС): PK=Wосос.
Характеристика релейного элемента (РЭ) приведена на рис. 35:
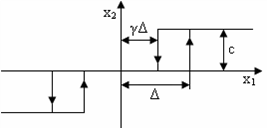
Рис. 35. Характеристика релейного элемента с зоной возврата
Здесь Δ – зона нечувствительности;
γ – коэффициент возврата;
х1=(х–хос)Кус .
Поведение системы по трем фазовым координатам при некотором про-извольном изменении входной координаты х показано на рис. 36.
Обязательным условием
является: ![]() . При этом хос при каждом включении
реле догоняет х, а при выключении остается неизменным.
. При этом хос при каждом включении
реле догоняет х, а при выключении остается неизменным.
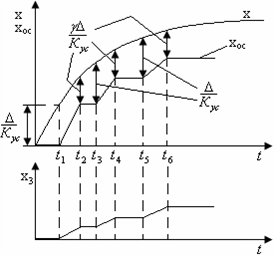
Рис. 36. Изменение фазовых координат в системе с интегрирующей ОС
При скользящем (пульсирующем) режиме при увеличении Kуc или уменьшении Δ, сигнал ОС будет скользить вдоль сигнала рассогласования х, все больше «прижимаясь» к нему, а исполнительный механизм, будучи тоже интегрирующим звеном, как и ОС, будет повторять поведение ОС. Таким об-разом, хос и х3 будут практически повторять х, но х3 – с неким коэффициентом
 . Тогда окажется
. Тогда окажется ![]() , а значит, регулирующее
воздействие про-порционально сигналу рассогласования (получили приближенно
П-закон).
, а значит, регулирующее
воздействие про-порционально сигналу рассогласования (получили приближенно
П-закон).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.