Математическое моделирование – описание объекта дифференциальными уравнениями разной степени сложности, которые связывают входы и выходы объекта, с последующим их решением. Достоинства: отсутствие расхода сырья, химикатов, энергоресурсов. Можно без опаски моделировать нерасчетные и аварийные режимы. Недостаток – отсутствие уверенности в адекватности модели, т.е. точности описания ею реального объекта.
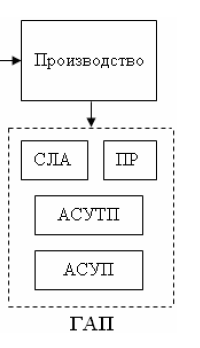
СЛА – обеспечивают регулирование отдельных технологических пара-метров, либо управление отдельными операциями (открыть/закрыть, вклю-чить/выключить). ПР – средства механизации.
Сферы, в которых необходимо применение промышленных роботов:
– опасные и вредные условия для человека (высокие и низкие температуры, давления, повышенная радиация);
– выполнение очень тонких и точных операций (изготовление инте-гральных микросхем);
– выполнение физически тяжелых работ;
– выполнение однообразных операций.
Роботы имеют две составные части: манипулятор (имитация руки) и система управления (имитация мозга). Конструкция манипулятора зависит от характера объекта. Система управления может быть разной степени сложности и совершенства: система цикловая, позиционная, контурная, обучаемая, очувствленная (обладающая осязанием, зрением, слухом).
АСУТП – система управления сложным технологическим процессом, зависящим от многих взаимосвязанных параметров. В этом случае независимое управление этими параметрами может не дать желаемых результатов, т.к. отдельные локальные системы будут мешать друг другу. Таким образом, в АСУТП отдельные системы должны работать согласованно, управляться из единого мозгового центра (ЭВМ, контроллер).
АСУП – система организационного управления.
Задачи АСУП:
1) учет простоев оборудования и их причин;
2) учет запасов сырья, химикатов и готовой продукции на складах;
3) учет расхода сырья, химикатов и энергоресурсов;
4) учет продвижения продукции по производству;
5) оперативное и долгосрочное планирование производства;
6) финансовые расчеты (в частности, расчет заработной платы).
АСУТП – автоматизированная система управления технологическим процессом;
СЛА – средства локальной автоматики;
ПР – промышленные роботы;
К основным свойствам объектов регулирования относятся:
1. емкость;
2. время разгона;
3. самовыравнивание;
4. запаздывание.
В первом приближении многие объекты можно описать уравнением:
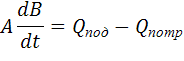
где А – параметр объекта;
В – регулируемая величина;
![]() –
скорость изменения регулируемой величины;
–
скорость изменения регулируемой величины;
![]() – подача вещества или
энергии в объект;
– подача вещества или
энергии в объект;
![]() –
потребления вещества или энергии из объекта.
–
потребления вещества или энергии из объекта.
Для
объекта регулирования уровня жидкости: ![]() ,
,
где S – площадь поверхности зеркала жидкости;
Н – уровень.
Подается и потребляется вещество.
Для
теплового объекта: 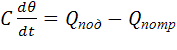 ,
,
где С – теплоемкость объекта,
θ – температура объекта.
Подается и потребляется энергия.
Если
![]() , то имеем равновесный
режим.
, то имеем равновесный
режим.
1. Емкость – количество вещества или энергии, содержащееся в объекте в номинальном (рабочем) режиме.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.