Рассмотрим регулятор РУ4-16А, его схема приведена на рис. 51:



Рис. 51. Функциональная схема регулятора РУ4-16А
Здесь РВП – реохорд вторичного прибора;
Σ – сумматор;
ВП – вибропреобразователь (преобразует с помощью прерывателя сиг-нал постоянного тока в сигнал переменного тока);
УН – усилитель напряжения;
УМ – усилитель мощности;
РЭ – трехпозиционный релейный элемент;
ИМ – исполнительный механизм постоянной скорости;
РОС – реохорд обратной связи;
ДУП – дистанционный указатель положения ИМ.
Наиболее интересным узлом данной схемы является сумматор. Рассмотрим его подробнее. Схема сумматора приведена на рис. 52.
Мостовая схема, куда включены РОС, R1, R2, R3 питается от источника постоянного напряжения.
В этой схеме два элемента настройки: R2 («ручная перестановка» ИМ) и R4 («статизм» – коэффициент обратной связи).
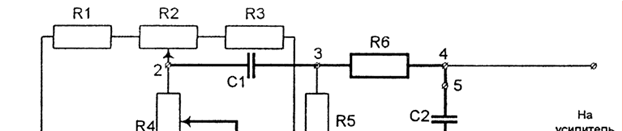
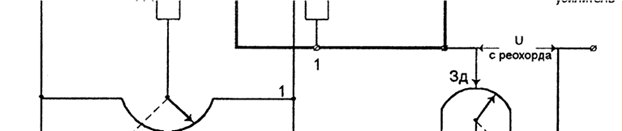
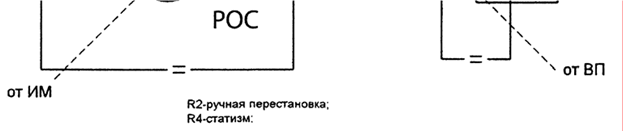
Рис. 52. Электрическая схема сумматора регулятора РУ4-16А
Важным элементом сумматора является двойная RC-цепочка: С1R5 (дифференцирующая цепь) и R6С2 (интегрирующая цепь) – интегро-диффе-ренцирующее звено.
Между клеммами 1, 2, 3, 4, 5, выведенными на лицевую панель прибора, можно устанавливать перемычки, реализуя тем самым любой закон регу-лирования.
Рассмотрим различные варианты установки перемычек:
• Если установлена перемычка 1-4, то сигнал ОС отсутствует, сигнал рассогласования подается на усилитель. Получаем трехпозиционное регули-рование с ИМ постоянной скорости. Реализуется закон, близкий к И-закону;
• Если установлена перемычка 2-3, то ИМ охвачен жесткой ОС. Реали-зуется П-закон;
• Если перемычек нет, то в ОС оказывается дифференцирующая це-почка, т.е. ИМ охвачен гибкой ОС. Реализуется ПИ-закон;
• Если установлены перемычки 2-3 и 4-5, то в ОС оказывается интег-рирующая цепочка, т.е. в системе реализуется ПД-закон (позволяет активно демпфировать колебания);
Необходимость в многоконтурных системах возникает тогда, когда встречается объект с несколькими регулируемыми величинами и наличием перекрестных связей (что на практике наблюдается довольно часто), из-за че-го регулирующее воздействие влияет не только на свою регулируемую вели-чину, но и на другую (или другие).
Пример такой системы представлен на рис. 63:
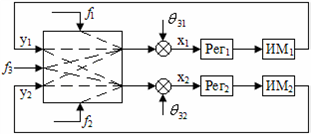
Рис. 63. Двухконтурная система с перекрестными связями в объекте
Общий подход к описанию динамики многоконтурных систем базируется на методе сумматоров. Рассмотрим его на примере системы, показанной на рис. 64:
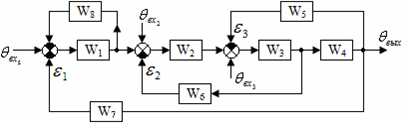
Рис. 64. Многоконтурная система с перекрещивающимися связями
Опишем динамику этой системы.
Представленная система имеет 3 входа θвх , 7 звеньев (с передаточными функциями W1÷W8), в том числе 4 звена обратной связи, 3 сумматора с вы-ходами ε1÷ε3.
Пусть все входы системы будут положительными, а обратные связи (ОС) отрицательными.
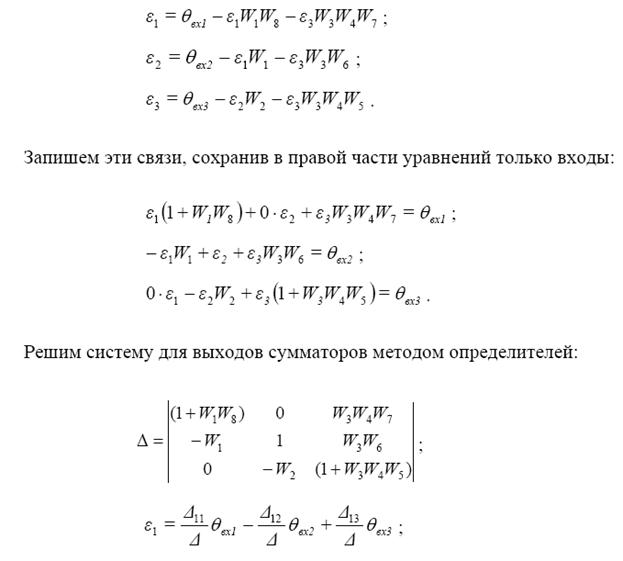
Свяжем выходы сумматоров с входами системы вхθ:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.