Рассмотрим другой вариант обратной связи.
Пусть передаточная функция ОС:  (инерционное
звено).
(инерционное
звено).
Будем считать релейное звено усилителем с большим коэффициентом усиления и включим его в усилительный элемент (рис. 37).
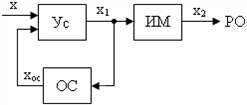
Рис. 37. Схема с включением релейного элемента в усилительное звено
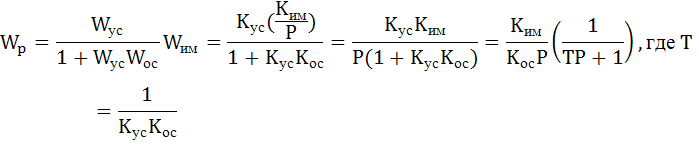
Получим приближенно передаточную функцию регулятора в виде:


Получили ПИ-закон.
Вернемся к случаю использования интегрирующей ОС, но считая релейный элемент усилителем (рис. 37). Подтвердим получение П-закона:
ОС интегрирующая: ![]() .
.
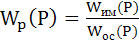
Тогда передаточная функция регулятора имеет вид
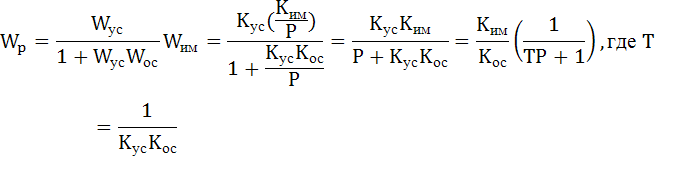
Пренебрегая инерционностью регулятора, имеем:
 - получили П-закон
- получили П-закон
Попробуем использовать жесткую ОС: ![]() , тогда
, тогда
Пренебрегая инерционностью регулятора, получим И-закон. Но при этом, вернувшись к рис. 36, иллюстрирующему пульсирующий режим, и представив себе поведение фазовых координат при жесткой ОС, обнаружим чрезвычайно высокую частоту пульсаций, что практически крайне нежела-тельно. Поэтому жесткая ОС в такой схеме не используется.
7 Уифицированные регуляторы (общая характеристика). Измерительные блоки МЗТА
Регуляторы МЗТА
Рассмотрим упрощенную унифицированную структуру регулятора ап-паратной системы (рис. 39):
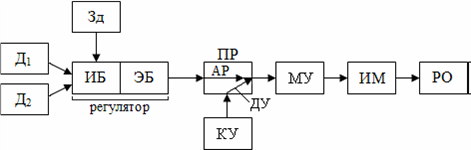
Рис. 39. Структура системы с регулятором РПИБ
Здесь ИБ – измерительный блок (формирует сигнал рассогласования);
ЭБ – электронный блок (формирует требуемый закон регулирования);
ПР – переключатель режимов (где АР – автоматическое регулирование, ДУ – дистанционное управление);
КУ – ключ управления;
МУ – магнитный усилитель (в варианте РПИК используется магнит-ный контактор);
ИМ – исполнительный механизм;
РО – регулирующий орган.
Рассмотрим более подробно измерительный и электронный блоки уни-фицированных регуляторов системы МЗТА.
Измерительные блоки (ИБ)
Схема измерительного блока регулятора РПИК-III показана на рис. 40.
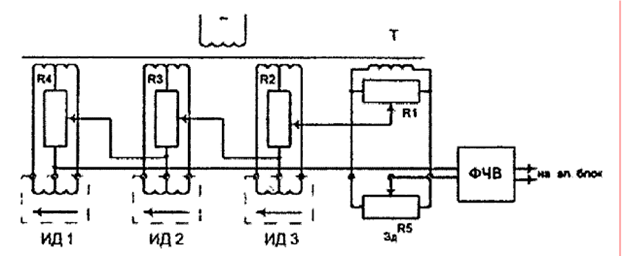
Рис. 40. Измерительный блок регулятора РПИК-III
Измерительный блок регулятора РПИК-III может контролировать тем-пературу в трех точках объекта с помощью трех индуктивных датчиков (ИД1ИД3). В его структуре четыре мостовые схемы переменного тока. В правый мост включены задатчик R5 и корректор R1 (R1 обеспечивает сигнал «0» на выходе блока, когда суммарный сигнал датчиков равен сигналу задат-чика). В остальные три мостовые схемы включены индуктивные датчики. ÷
Потенциометры чувствительности R2, R3 и R4 , включенные в выход-ные диагонали мостов, позволяют обеспечить необходимые весовые коэффи-циенты сигналов, формируемых тремя датчиками, в общем выходном сигна-ле блока.
Фазочувствительный выпрямитель (ФЧВ) преобразует сигнал рассо-гласования в виде переменного тока в напряжение постоянного тока, поляр-ность которого зависит от фазы преобразуемого сигнала. Сформированный таким образом сигнал подается на вход электронного блока
Схема измерительного блока регулятора РПИК-Т показана на рис. 41.
Основной частью схемы является мост постоянного тока, формирующий напряжение, компенсирующее сигнал термопары (ТП). Мост питается от стабилизированного источника постоянного напряжения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.