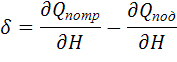
 , т.к.
, т.к. ![]() от H не зависит
от H не зависит
Отсюда получаем, что δ>0 – положительное самовыравнивание на стороне потребления.
2)
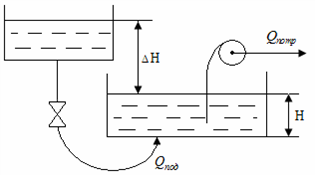
Рис. 13. Подача жидкости самотеком, потребление насосом
 , Т.К.
, Т.К. ![]() от H не зависит
от H не зависит
 , т.к. чем больше H, тем меньше
, т.к. чем больше H, тем меньше ![]() и меньше
и меньше ![]()
Отсюда получаем, что δ>0 – положительное самовыравнивание на стороне подачи.
3)
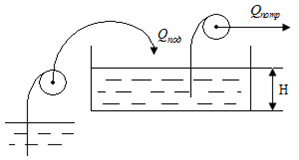
Рис. 14. Подача и потребление жидкости насосами
, , т.к. ![]() и
и ![]() от H не зависят
от H не зависят
Отсюда получаем, что δ= 0 – самовыравнивания нет.
В 1-ом и 2-ом случае δ настолько мало, что его можно считать практически равным нулю (δ= 0).
4. Запаздывание объекта регулирования
Рассмотрим более реальный вариант поведения системы при δ> 0. Например, это утюг (тепловые объекты всегда имеют положительное самовыравнивание). Он имеет следующую переходную характеристику (рис. 15).
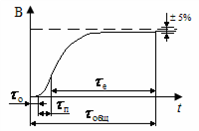
Рис. 15. Запаздывание объекта регулирования
Здесь общτ– общее запаздывание;
оτ– чистое запаздывание, когда регулируемая величина еще не меняется;
пτ– переходное запаздывание;
еτ– емкостное запаздывание (основное заполнение емкости веществом или энергией).
В непрерывных системах непрерывному изменению регулируемой ве-личины соответствует непрерывное изменение всех сигналов в системе, включая регулирующее воздействие.
Основной характеристикой непрерывного регулятора является закон регулирования – это уравнение, связывающие регулирующее воздействие (у) с сигналом рассогласования (х) без учета инерционности регулятора.
![]()
Основные законы регулирования приведены в табл. 1.
Таблица 1. Таблица законов регулирования
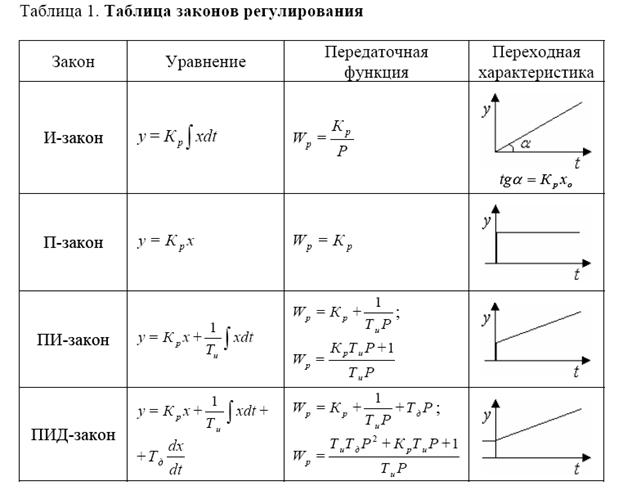
Достоинство И-закона – астатизм (нет статической ошибки);
Недостатки И-закона – низкое динамическое качество (колебательность, малое быстродействие, большое перерегулирование).
Достоинство П-закона – высокое динамическое качество;
Недостаток П-закона – статизм (есть статическая ошибка).
Достоинства ПИ-закона – астатизм, большое быстродействие, малая колебательность. Самый распространенный.
Достоинства ПИД-закона – еще более высокое динамическое качество, чем при ПИ-законе. Самый совершенный.
Недостаток ПИД-закона – трудно реализуется в аналоговых регуляторах.
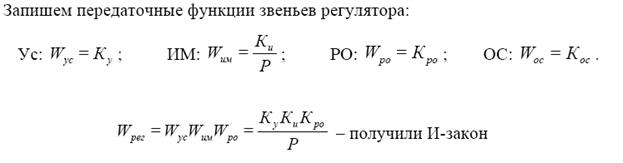
Практические способы реализации непрерывных законов
Рассмотрим типовую структуру замкнутой САР (рис. 20).
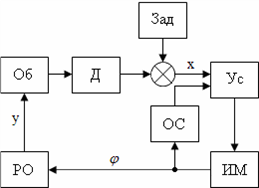
Рис. 20. Типовая структура замкнутой САР
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.