1 вариант – стабилизация возмущения f (рис. 68).
Но такой вариант редко можно себе позволить, даже если возмущение поддается измерению. Так, например, недопустимо стабилизировать расход жидкости из бака хранения, который питает несколько потребителей раство-ра, работающих несогласованным друг с другом образом. В этом случае при одновременном запросе раствора несколькими потребителями расход рас-твора к каждому из них может быть недопустимо мал.
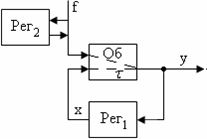
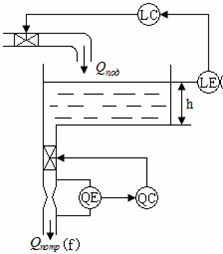
Рис. 68. Каскад стабилизации возмущения
Здесь LE – датчик уровня;
LC – регулятор уровня;
QE – датчик расхода;
QC – регулятор расхода.
2 вариант – каскад с воздействием по возмущению (рис. 69):
Рис. 69. Каскад с воздействием по возмущению
Здесь LE – датчик уровня;
LC – регулятор уровня;
2 вариант – каскад с воздействием по возмущению (рис. 69):
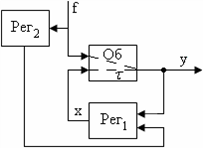
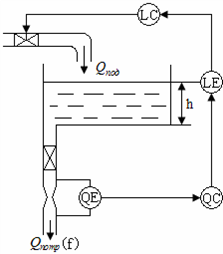
Рис. 69. Каскад с воздействием по возмущению
Здесь LE – датчик уровня; LC – регулятор уровня;
QE – датчик расхода; QC – электронный корректирующий прибор.
Например, в контур регулирования уровня жидкости в емкости может быть введено воздействие по расходу жидкости из емкости, являющемуся основным возмущением.
3 вариант – воздействие по промежуточной координате (z), которая тоже реагирует на f , но с меньшим отставанием, чем регулируемая величина (у) (рис. 70):
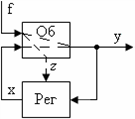
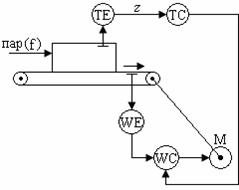
Рис. 70. Каскад с воздействием по промежуточной координате
Здесь TE – датчик температуры;
TC – электронный корректирующий прибор;
WE – датчик влажности;
WC – регулятор влажности;
М – двигатель, изменяющий скорость транспортировки ткани.
Например, в систему регулирования влажности ткани на выходе из сушильной камеры, используя в качестве регулирующего воздействия изме-нение скорости транспортировки ткани, можно ввести воздействие по изме-нению температуры в камере. Считая в качестве основного возмущения из-менение параметров пара, подаваемого в камеру, можно утверждать, что
температура в камере быстрее среагирует на это возмущение, чем регули-руемая влажность ткани, а значит, качество регулирования может быть по-вышено.
17 ОБЩАЯ ХАРКТЕРИСТИКА РЕГУЛЯТОРОВ ТЕМПЕРАТУРЫ. Двухпозиционный полупроводниковый терморегулятор ПТР-2
Принципиальная электрическая схема ПТР-2 приведена на рис. 73:
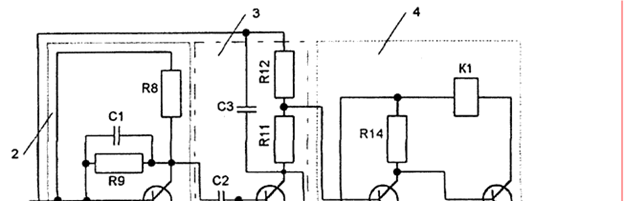
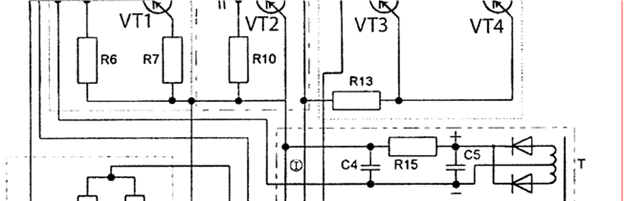
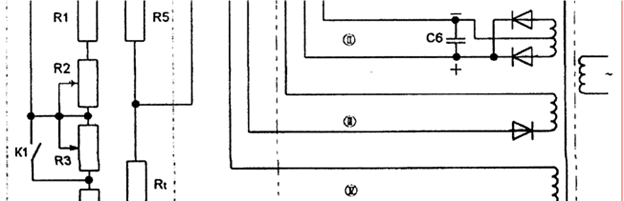
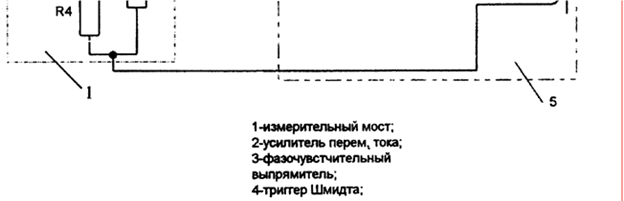
Рис. 73. Принципиальная электрическая схема регулятора ПТР-2
На схеме приняты следующие обозначения основных блоков:
1) Измерительный мост переменного тока, формирующий сигнал рас-согласования
Rt – датчик температуры (терморезистор);
R2 – задатчик;
R3 – потенциометр задания ширины зоны возврата.
Амплитуда и фаза сигнала разбаланса моста зависят от величины и знака сигнала рассогласования;
2) Усилитель переменного тока, базирующийся на транзисторе VT1
C1 и R9 – обратная связь, улучшающая характеристики усилителя;
3) Фазочувствительный выпрямитель (ФЧВ), базирующийся на VT2;
4) Триггер Шмидта (реализует двухпозиционную релейную характери-стику);
5) Источник питания, имеющий 4 выхода:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.