·
разделяем переменные в дифференциальном уравнении  или
или  и
интегрируем по времени дифференциальные уравнения с разделенными переменными с
учетом начальных условий задачи, вычисляем угловую скорость твердого тела
и
интегрируем по времени дифференциальные уравнения с разделенными переменными с
учетом начальных условий задачи, вычисляем угловую скорость твердого тела ![]() или уравнение вращения твердого тела
или уравнение вращения твердого тела
![]() ;
;
·
вычисляем скорость любой точки твердого тела ![]() , ускорение любой точки твердого тела
, ускорение любой точки твердого тела
![]() .
.
|
J |
Задачи для самостоятельного решения |
|||||
|
|
1. Угловая скорость |
|||||
|
2.
Станок со шкивом
|
||||||
|
|
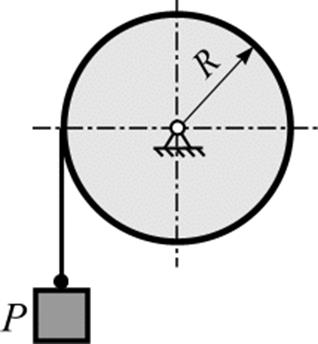
3. Вал радиусом |
|||||
|
|
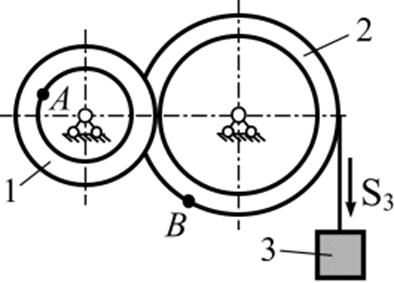
4. Механизм, состоящий из двух составных дисков,
приводится в движение гирей, подвешенной к одному из дисков на нерастяжимой
нити. Движение гири задано уравнением |
|||||
|
|
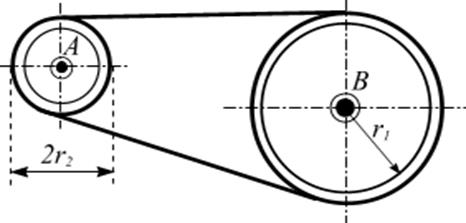
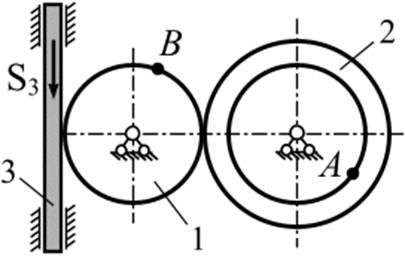
5.
Механизм, состоящий из двух
дисков, приводится в движение рейкой, находящейся в зацеплении с первым
диском. Движение рейки задано уравнением
|
|||||
|
|
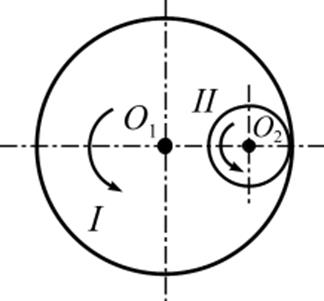
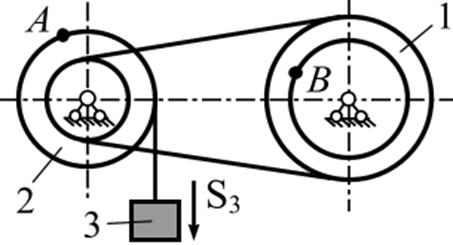
6.
Механизм, состоящий из двух
ступенчатых дисков, приводится в движение грузом, подвешенным к диску 2
нерастяжимой нитью. Движение гири задано уравнением 2с, если |
|||||
|
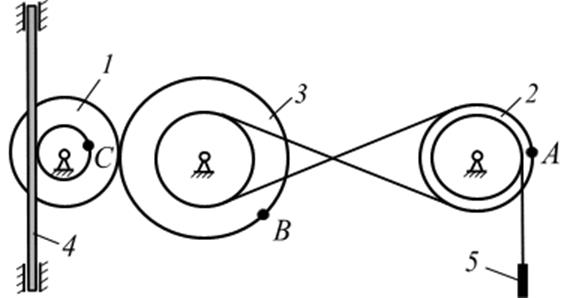
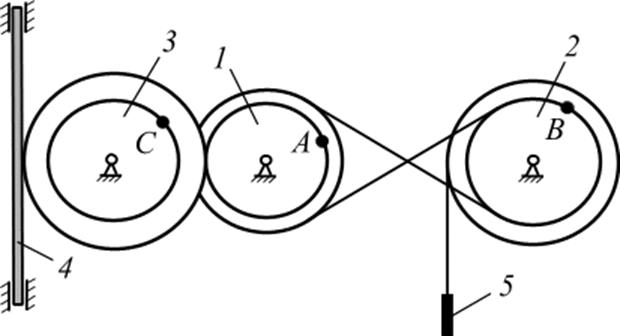
7.
Вычислить скорости точек А,
С и ускорение точки В через
|
||||||
|
8.
Вычислить скорости точек А,
С и ускорение точки В через
|
||||||
|
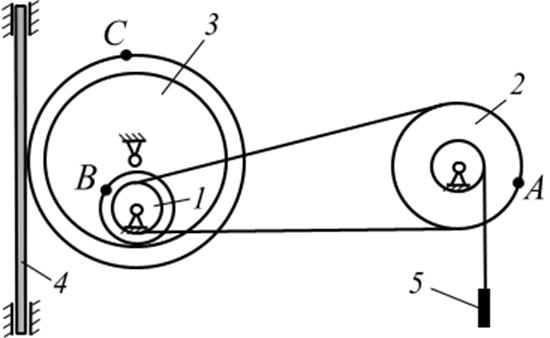
9. Вычислить скорость
точки А и ускорение точек С и В через
|
||||||
3. Сложное движение точки
|
J |
Вспомни теорию |
|
Абсолютная скорость. Абсолютная скорость точки равна геометрической сумме ее относительной и переносной скорости:
![]() .
.
Здесь ![]() - скорость относительного движения,
- скорость относительного движения,
![]() – скорость переносного движения.
– скорость переносного движения.
Вычисление относительной скорости ![]() . Скорость вычисляется в
зависимости от способа задания относительного движения.
. Скорость вычисляется в
зависимости от способа задания относительного движения.
А. Движение точки в ее относительном движении задано координатным способом,
т.е. в декартовой системе координат задают функции ![]() тогда
тогда
 ,
,  .
.
Б. Движение точки в ее относительном движении задано естественным
способом, т.е. задана траектория движения точки и функциональная зависимость
дуговой координаты со временем ![]() . Выбирают yнаправление осей естественного трехгранника τ, n.
. Выбирают yнаправление осей естественного трехгранника τ, n.
Тогда 
Вычисление переносной скорости. Рассмотрим частные случаи вычисления переносной скорости.
1.
Подвижная система координат движется поступательно со скоростью ![]() . В этом случае
. В этом случае  и переносная скорость совпадает со
скоростью подвижной системы координат, т.е.
и переносная скорость совпадает со
скоростью подвижной системы координат, т.е.
 .
.
2.
Подвижная система координат вращается относительно неподвижной оси c угловой скоростью ![]() .
В этом случае
.
В этом случае  , тогда переносная
скорость:
, тогда переносная
скорость:
 .
.
Абсолютное ускорение. Абсолютное ускорение точки является векторной суммой трех ускорений: относительного, переносного и ускорения Кориолиса.
![]() .
.
Здесь: ![]() – ускорение
относительного движения,
– ускорение
относительного движения,
![]() – переносное ускорение,
– переносное ускорение,
 – ускорение Кориолиса.
– ускорение Кориолиса.
Вычисление относительного ускорения. Относительное ускорение вычисляется в зависимости от способа задания относительного движения.
А. При координатном способе задания относительного движения точки М:

 ;
;  ;
;
 .
.
Б. При естественном способе задания движения:
 ,
,  ,
,
 ,
,
здесь ![]() – радиус кривизны относительной
траектории точки М.
– радиус кривизны относительной
траектории точки М.
Вектор относительного ускорения расположен в соприкасающейся плоскости относительного движения.
Вычисление переносного ускорения. Переносное ускорение вычисляется в зависимости от способа задания относительного движения и движения подвижной системы координат.
А. Подвижная система координат
движется поступательно. В этом случае и
 , следовательно, переносное ускорение
точки М:
, следовательно, переносное ускорение
точки М:
![]() .
.
Б. Подвижная система координат
вращается относительно неподвижной оси с угловой скоростью ![]() и угловым ускорением
и угловым ускорением ![]() . В этом случае
. В этом случае  , тогда переносное ускорение
, тогда переносное ускорение
Если точка движется по окружности радиусом h, то здесь:

Вектор переносного ускорения расположен в соприкасающейся плоскости переносного движения, т.е. в плоскости, перпендикулярной оси вращения.
Вычисление ускорения Кориолиса. Модуль ускорения Кориолиса:
 .
.
Вектор ускорения Кориолиса направлен перпендикулярно вектору угловой
скорости ![]() , т. е.
, т. е. ![]() .
.
 Правило
Жуковского: чтобы получить направление ускорения Кориолиса, следует
вектор проекции относительной скорости
Правило
Жуковского: чтобы получить направление ускорения Кориолиса, следует
вектор проекции относительной скорости ![]() на
плоскость, перпендикулярную
на
плоскость, перпендикулярную ![]() , повернуть на
, повернуть на ![]() вокруг оси вращения в
направлении дуговой стрелки вращения (рис.3.1).
вокруг оси вращения в
направлении дуговой стрелки вращения (рис.3.1).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.