|
а |
|
б |
|
|
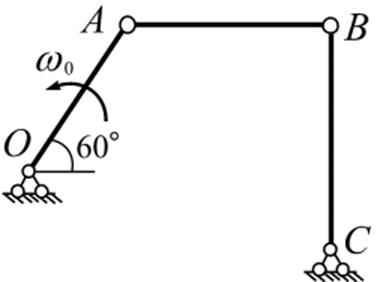
Рис. 4.17 |
|||
Решение. Вычислим
угловые скорости звеньев ![]() -
- ![]() и
и ![]() -
- ![]() :
:
![]() ,
,  ;
;
 ,
,  ,
,
Здесь точка Р - точка мгновенного центра скоростей шатуна АВ. Его положение определяется точкой пересечения перпендикуляром к векторам скоростей точек А и В (рис. 4.17, б).
Из ![]() определяем
расстояния составляют:
определяем
расстояния составляют: ![]() см;
см; ![]() см; тогда
см; тогда
 (с-1);
(с-1);
 (с-1).
(с-1).
Аналитический способ
Применим теорему об ускорениях при плоском движении тела к точке В. За полюс выбираем точку А, ускорение в этой точке известно:
 (см/с2);
(см/с2);
Тогда  , (а)
, (а)
здесь  (см/с2);
(см/с2); 
В полученном векторном равенстве (а) три неизвестных:
модуль и направление ускорения в точке В - ![]() и угловое ускорение шатуна АВ -
и угловое ускорение шатуна АВ - ![]() (
( ).
).
Для решения задачи необходимо записать еще одно
уравнение. За второй полюс выберем точку ![]() ,
, ![]() , тогда (рис. 4.17 б):
, тогда (рис. 4.17 б):
 , (б)
, (б)
здесь  (см/с2);
(см/с2); 
В полученном векторном равенстве (б) тоже три
неизвестных: модуль и направление ускорения в точке В - ![]() и угловое ускорение кривошипа
и угловое ускорение кривошипа ![]() -
- ![]() . (
. ( ).
).
Получили систему уравнений:
 (в)
(в)
Исключим вектор ![]() из
(в). Для этого приравняем правые части уравнений (в) между собой, получим
следующее векторное уравнение, которое будет содержать только две неизвестные
величины:
из
(в). Для этого приравняем правые части уравнений (в) между собой, получим
следующее векторное уравнение, которое будет содержать только две неизвестные
величины: ![]() и
и ![]() :
:
 . (г)
. (г)
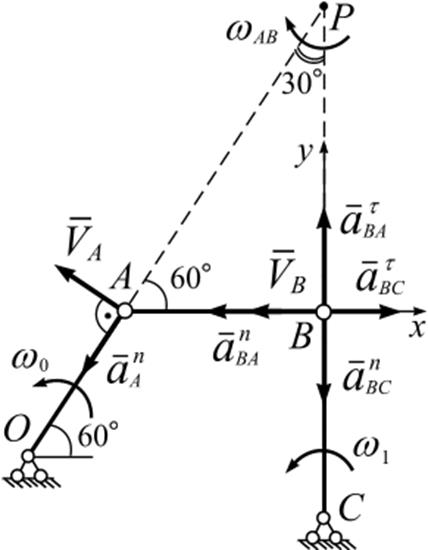
Совместим с точкой В начало декартовой системы координат (рис. 4.18, а), и спроецируем равенство (г) на эти оси:
 ; (1)
; (1)
 . (2)
. (2)
Получили систему двух скалярных уравнений с двумя
неизвестными:  и
и  .
Решая последовательно уравнения (1-2), получаем:
.
Решая последовательно уравнения (1-2), получаем:
 (см/с2);
(см/с2);
 (см/с2).
(см/с2).
|
а |
|
б |
|
|
Рис. 4.18 |
|||
Знак (-) модуля  показывает,
что истинное направление этого вектора противоположно выбранному на схеме (рис.
4.18 б).
показывает,
что истинное направление этого вектора противоположно выбранному на схеме (рис.
4.18 б).
Вычислим ускорение точки В:
 (см/с2).
(см/с2).
Направление вектора ![]() получаем
построением параллелограмма на векторах
получаем
построением параллелограмма на векторах  и
и
 (рис. 4.18, б).
(рис. 4.18, б).
Графический (геометрический) способ
Ускорение шарнира В получим построением многоугольника ускорений (рис. 4.19). Рассмотрим векторное равенство (г):
 ,
,
здесь
![]() (см/с2),
(см/с2),
 (см/с2),
(см/с2),  (см/с2).
(см/с2).
В выбранном масштабе откладываем из точки В,
параллельно ОА, ускорение ![]() . Из конца этого
вектора в том же масштабе, параллельно оси звена АВ, откладываем
нормальную составляющую ускорения
. Из конца этого
вектора в том же масштабе, параллельно оси звена АВ, откладываем
нормальную составляющую ускорения  , и из его конца
проводим пунктирную прямую I-I, перпендикулярную (параллельную
неизвестному ускорению
, и из его конца
проводим пунктирную прямую I-I, перпендикулярную (параллельную
неизвестному ускорению  ). Затем из точки
В, в том же масштабе, откладываем нормальную составляющую ускорения
). Затем из точки
В, в том же масштабе, откладываем нормальную составляющую ускорения  - вдоль звена ВС,
из конца этого вектора проводим перпендикулярную ему пунктирную прямую II-II, параллельную
неизвестному ускорению
- вдоль звена ВС,
из конца этого вектора проводим перпендикулярную ему пунктирную прямую II-II, параллельную
неизвестному ускорению  (рис. 4.19).
(рис. 4.19).
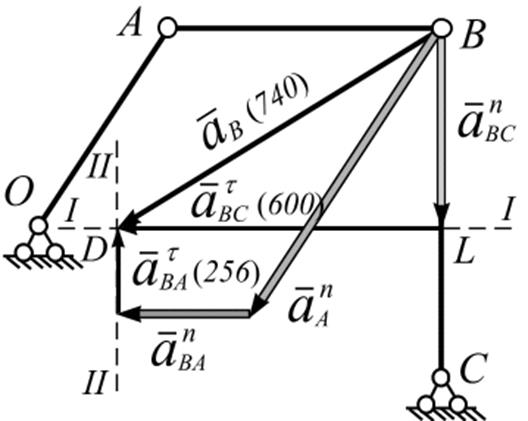
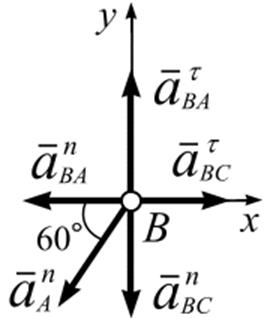
Рис. 4.19
Обозначим точку пересечения прямых I-I и II-II буквой D.
Соединим точку В и точку D, полученная прямая ![]() соответствует ускорению точки В -
соответствует ускорению точки В - ![]() ; прямая
; прямая ![]() соответствует
ускорению ; прямая
соответствует
ускорению ; прямая ![]() соответствует
ускорению . Замеряем длину отрезков, с учетом
принятого масштаба, получаем:
соответствует
ускорению . Замеряем длину отрезков, с учетом
принятого масштаба, получаем:
 (см/с2);
(см/с2);
 (см/с2);
(см/с2); ![]() см/с2).
см/с2).
Результаты получены двумя разными способами, хорошо согласуются друг с другом.
Ответ:![]() (см/с2).
(см/с2).
(!!! Алгоритм решения
При решении задач на вычисление уравнений движения плоского твердого тела и вычисление скоростей точек, жестко связанных с плоской фигурой, рекомендуется такая последовательность действий:
· выбираем неподвижную систему координат и точку С (полюс), жестко связанную с плоской фигурой;
·
составляем уравнения движения плоской фигуры: определяем координаты
полюса относительно неподвижной системы координат ![]() ,
,
![]() ; проводим через точку C прямую, определяем угол
; проводим через точку C прямую, определяем угол ![]() ,
который эта прямая составляет с горизонтальной неподвижной осью;
,
который эта прямая составляет с горизонтальной неподвижной осью;
·
вычисляем скорость полюса ![]() и
скорость любой точки тела (например, точки В), как точки, мгновенно
вращающейся вокруг полюса -
и
скорость любой точки тела (например, точки В), как точки, мгновенно
вращающейся вокруг полюса -  ;
;
·
вычисляем скорость любой точки, жестко связанной с телом,
(движущейся вместе с полюсом и вращающейся вокруг полюса), по теореме о скоростях
точек тела при его плоскопараллельном движении:  .
.
Если
определить ![]() аналитически сложно, находим
мгновенный центр скоростей для заданного положения твердого тела, восставляя
перпендикуляры к векторам скоростей двух точек плоской фигуры (точки В и
С, направление вектора скорости в точках С и В известно),
и определяем мгновенную угловую скорость фигуры.
аналитически сложно, находим
мгновенный центр скоростей для заданного положения твердого тела, восставляя
перпендикуляры к векторам скоростей двух точек плоской фигуры (точки В и
С, направление вектора скорости в точках С и В известно),
и определяем мгновенную угловую скорость фигуры.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.