Скорость точки. Вектор
скорости ![]() направлен по оси
направлен по оси![]() и вычисляется:
и вычисляется:
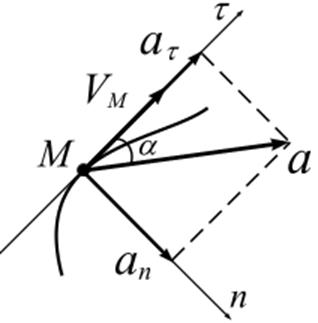
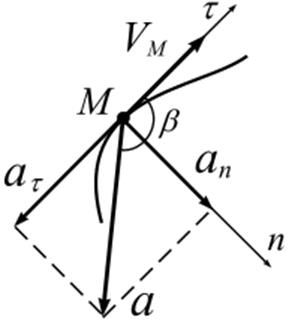
Ускорение точки. Вектор ускорения
![]() раскладывается на два вектора
раскладывается на два вектора ![]() и
и ![]() (рис. 1.14):
(рис. 1.14):
![]() .
.
Здесь: вектор  –
определяет касательную составляющую ускорения
–
определяет касательную составляющую ускорения ![]() .
Модуль касательного ускорения
.
Модуль касательного ускорения ![]() показывает
изменение модуля скорости. Вектор
показывает
изменение модуля скорости. Вектор ![]() при
при ![]() направлен в сторону вектора
направлен в сторону вектора ![]() (ускоренное движение) (рис. 1.14, а),
а при
(ускоренное движение) (рис. 1.14, а),
а при ![]() – против вектора
– против вектора ![]() (замедленное движение) (рис. 1.14, б);
(замедленное движение) (рис. 1.14, б);
§ вектор  (
(![]() –
радиус кривизны траектории) – определяет нормальную составляющую ускорения.
Модуль нормального ускорения
–
радиус кривизны траектории) – определяет нормальную составляющую ускорения.
Модуль нормального ускорения  определяет изменение
направления вектора скорости
определяет изменение
направления вектора скорости ![]() . При
прямолинейном движении
. При
прямолинейном движении ![]() =
=![]() ,
,
 , вектор
, вектор ![]() при
движении не меняет направление. При криволинейном движении точки нормальная
составляющая ускорения
при
движении не меняет направление. При криволинейном движении точки нормальная
составляющая ускорения ![]() всегда направлена внутрь
вогнутости траектории вдоль оси
всегда направлена внутрь
вогнутости траектории вдоль оси ![]() , рис. 1.14.
, рис. 1.14.
Учитывая ортогональность ![]() и
и ![]() ,
имеем:
,
имеем:
 ,
,  .
.
|
а |
|
б |
|
Рис. 1.14
Связь координатного и естественного способов заданий движения точки. Уравнение движения в естественной форме связано с уравнениями движения в координатной форме соотношением:
 .
.
![]() Здесь
Здесь ![]() ,
, ![]() .
.
Тогда
 ;
;
 ;
;
 .
.
Радиус
кривизны может быть вычислен через модуль скорости и модуль нормального
ускорения:  .
.
Задача 1.7. Движение точки М задано уравнением:
![]() (м). (а)
(м). (а)
Вычислить путь ![]() ,
пройденный точкой М за 10 с.
,
пройденный точкой М за 10 с.
Решение. Путь, пройденный точкой, вычислим по интегральной зависимости:

Согласно уравнению движения (а), имеем:
![]() .
.
При ![]() с точка М меняет свое
направление, поэтому путь
с точка М меняет свое
направление, поэтому путь ![]() , пройденный
точкой за 10 с, будет вычисляться так:
, пройденный
точкой за 10 с, будет вычисляться так:

![]() (м).
(м).
Ответ:
![]() (м).
(м).
Задача 1.8. Движение точки в плоскости ![]() задано
координатным способом уравнениями
задано
координатным способом уравнениями ![]() ,
, ![]() :
:
|
|
(а) |
|
(б) |
где ![]() и
и
![]() выражены в см,
выражены в см, ![]() - в с.
- в с.
Требуется задать движение точки в явном виде,
вычислитьскорость, нормальную и касательную составляющие ускорения,
радиус кривизны траектории в соответствующей точке для момента времени ![]() с.
с.
Решение. Дляпостроения траектории в декартовой системе координат определим область
значений ![]() и
и ![]() .
Функции
.
Функции ![]() и
и ![]() - ограничены, тогда область значений
- ограничены, тогда область значений ![]() и
и
![]() определяетя неравенствами:
определяетя неравенствами:
![]() ;
; ![]() .
.
Получим зависимость ![]() .
Для этого из (а)-(б) исключим параметр
.
Для этого из (а)-(б) исключим параметр ![]() . Введём
обозначение
. Введём
обозначение  , тогда уравнения (а) и (б)
перепишутся в виде
, тогда уравнения (а) и (б)
перепишутся в виде
Распишем первое уравнение полученной системы,
используя формулу двойного угла (![]() ), приведем
подобные члены и выразим
), приведем
подобные члены и выразим ![]() через
через ![]() :
:

 .
.
Итак, координаты связаны между собой зависимотью
![]() .
.
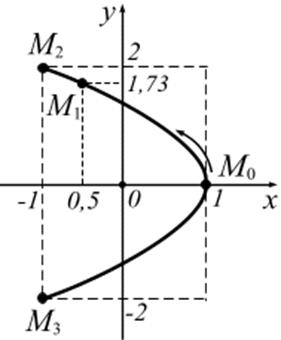
Анализируем траекторию движения точки. Траекторией
точки является парабола с координатой вершины ![]() ,
ветви параболы вытянуты вдоль оси
,
ветви параболы вытянуты вдоль оси ![]() слева от вершины
(рис. 1.15, а).
слева от вершины
(рис. 1.15, а).
|
а |
|
б |
|
в |
|
|
Рис. 1.15 |
|||||
При ![]() функция
функция![]()
 убывает,
а
убывает,
а  - возрастает
(рис.1.15, а), следовательно, точка из положения
- возрастает
(рис.1.15, а), следовательно, точка из положения ![]() начинает
движение по верхней ветви параболы до точки
начинает
движение по верхней ветви параболы до точки ![]() ,
далее точка движется обратно по верхней ветви траектории и через точку с
координатами
,
далее точка движется обратно по верхней ветви траектории и через точку с
координатами ![]() движется по нижней ветви параболы до
точки
движется по нижней ветви параболы до
точки ![]() и т.д.
и т.д.
В целом точка М совершает колебательные движения по построенной параболе в ограниченной пунктиром области. Направление движения в первые 2 с указано стрелкой на рис. 1.15, а.
Вычислим положение точки на траектории при ![]() с:
с:
 (см);
(см);
 (см).
(см).
2. Вычислим скорость точки ![]() при
при ![]() с.
с.

 (см/с);
(см/с);

 (см/с);
(см/с);
 (см/с).
(см/с).
Значения ![]() и
и ![]() отложим в масштабе на графике, рис.
1.15, б. Вектор скорости точки
отложим в масштабе на графике, рис.
1.15, б. Вектор скорости точки ![]() является
диагональю параллелограмма, достроенного на этих векторах и определяет направление
движения точки, а также определяет направление и положение касательной оси
является
диагональю параллелограмма, достроенного на этих векторах и определяет направление
движения точки, а также определяет направление и положение касательной оси![]() .
.
Вычислим ускорение точки ![]() при
при
![]() с:
с:

 (см/с2);
(см/с2);

 (см/с2);
(см/с2);
 (см/с2).
(см/с2).
Вектор ускорения точки ![]() –
–
![]() - получаем построением параллелограмма на проекциях ускорений
- получаем построением параллелограмма на проекциях ускорений
![]() и
и ![]() в
выбранном масштабе, рис. 1.15, в. Как видно из рис., вектор полного ускорения
точки
в
выбранном масштабе, рис. 1.15, в. Как видно из рис., вектор полного ускорения
точки ![]() направлен внутрь вогнутости
траектории движения точки.
направлен внутрь вогнутости
траектории движения точки.
Касательная и нормальная составляющие ускорения точки. При координатном способе задания движения указанные составляющие ускорения рассчитываются по формулам

 (см/с2);
(см/с2);

 (см/с2).
(см/с2).
Касательное и нормальное ускорения точки можно
вычислить геометрически. Для этого в точке ![]() необходимо
построить оси естественного трехгранника
необходимо
построить оси естественного трехгранника ![]() и
и
![]() . Положение и направление оси
. Положение и направление оси ![]() определили ранее - по построенному вектору скорости точки
определили ранее - по построенному вектору скорости точки ![]() .
Перпендикулярно этой оси, в
.
Перпендикулярно этой оси, в  сторону
вогнутости траектории, проведём главную нормаль
сторону
вогнутости траектории, проведём главную нормаль ![]() (полуось).
Отложим в масштабе проекции
(полуось).
Отложим в масштабе проекции ![]() и
и ![]() и построим вектор
и построим вектор ![]() (рис. 1.16).
(рис. 1.16).
Проекция вектора ускорения ![]() на
ось
на
ось ![]() будет соответствовать касательной
составляющей ускорения
будет соответствовать касательной
составляющей ускорения ![]() . Измеряя длину указанного
вектора и умножая на масштаб, получим значение
. Измеряя длину указанного
вектора и умножая на масштаб, получим значение ![]() ,
в данном случае
,
в данном случае ![]() (см/с2).
Вектор
(см/с2).
Вектор ![]() совпадает по направлению с вектором
скорости точки
совпадает по направлению с вектором
скорости точки ![]() , следовательно, движение
точки по параболе в данный момент времени – ускоренное.
, следовательно, движение
точки по параболе в данный момент времени – ускоренное.
Соответственно проекция ![]() на ось
на ось ![]() будет
определять нормальное ускорение
будет
определять нормальное ускорение ![]() . Измеряя длину
полученной проекции и умножая на масштаб, получим значение
. Измеряя длину
полученной проекции и умножая на масштаб, получим значение ![]() , в данном случае
, в данном случае ![]() (см/с2).
(см/с2).
Получено достаточно
хорошее соответствие значений ![]() и
и ![]() , рассчитанных разными способами.
, рассчитанных разными способами.
Радиус кривизны траектории.
Вычисим радиус кривизны траектории. Имеем
откуда:  (см).
(см).
Вычислим уравнение движения точки, заданном естественном
способом задания - ![]() .
.
Имеем:



 .
.
Получили уравнение движения точки, заданное естественным способом в интегральном виде.
Ответ:
уравнение траектории точки в явном виде ![]() ;
скорость точки
;
скорость точки ![]() (см/с); ускорения
точки
(см/с); ускорения
точки ![]() (см/с2),
(см/с2), ![]() (см/с2),
(см/с2), ![]() (см/с2); радиус
кривизны траектории
(см/с2); радиус
кривизны траектории ![]() см;
см;  .
.
Задача 1.9. Движение точки в плоскости ![]() задано
координатным способом уравнениями
задано
координатным способом уравнениями
![]() (см), (а)
(см), (а)
![]() (см). (б)
(см). (б)
Требуется задать движение точки в явном виде,
вычислитьскорость, нормальную и касательную составляющие
ускорения, радиус кривизны траектории в соответствующей точке для момента
времени ![]() с.
с.
Решение. Дляпостроения траектории в декартовой системе координат определим область
значений ![]() и
и ![]() .
Имеем из (а) и (б):
.
Имеем из (а) и (б):
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.