|
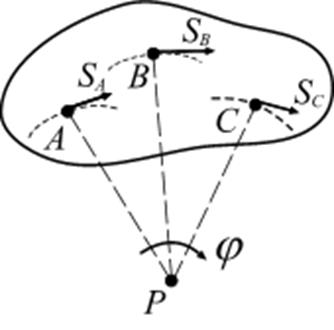
Тогда, каждая точка тела будет мгновенно двигаться по окружности, радиус которой определяется расстоянием этой точки до МЦС (рис. 4.4), дуга, по которой пройдет каждая точка тела в единицу времени, будет равна
|
Рис.4.4 |
Если положение МЦС известно, то, приняв МЦС за полюс (![]() ), любые точки, например точки А
и В (рис. 4.5), будут направлены перпендикулярно радиусу, равному расстоянию
от этой точки до точки МЦС:
), любые точки, например точки А
и В (рис. 4.5), будут направлены перпендикулярно радиусу, равному расстоянию
от этой точки до точки МЦС:
![]() ;
;![]()
Здесь АР и ВР – расстояние от точек А и В до МЦС, т.е. до точки Р.
Следовательно, если положение МЦС известно, то скорости точек тела вычисляют так же, как и в случае вращения тела в плоскости вокруг неподвижного центра
Частные случаи вычисления точки МЦС.
o Цилиндрическое тело катится по неподвижной поверхности, точка касания Р является МЦС (рис. 4.6, а), т.е. тело мгновенно вращается относительно точки касания Р.
o
Скорости точек А и В тела параллельны друг другу,
причем линия АВ не перпендикулярна к ![]() и
и
![]() (рис. 4.6 б), точка МЦС находится в
бесконечности, тогда
(рис. 4.6 б), точка МЦС находится в
бесконечности, тогда  , т.е. тело движется мгновенно-поступательно.
, т.е. тело движется мгновенно-поступательно.
o
Скорости точек А и В тела параллельны друг другу и
при этом ![]() , положение точки МЦС определяется
построениями, показанными на рис. 4.6 в, г; тело совершает мгновенно-вращательное
движение вокруг точки Р.
, положение точки МЦС определяется
построениями, показанными на рис. 4.6 в, г; тело совершает мгновенно-вращательное
движение вокруг точки Р.
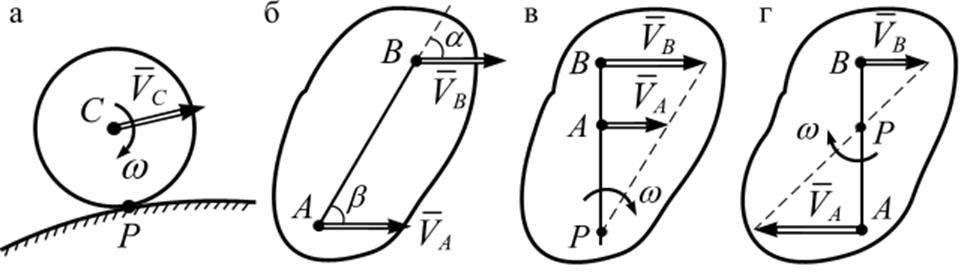
Рис. 4.6
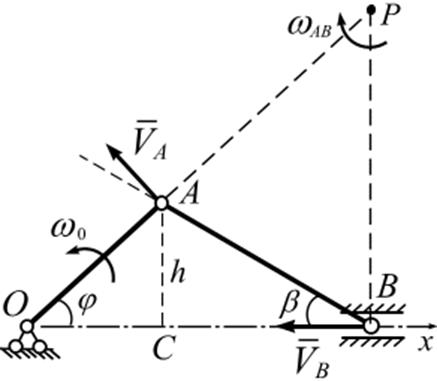
Задача 4.2.
Кривошипно-шатунный механизм (рис. 4.7) состоит из кривошипа ОА, шатуна АВ
и ползуна В. Кривошип ОА длиной ![]() м
вращается с угловой скоростью
м
вращается с угловой скоростью ![]() с-1. Длина шатуна
с-1. Длина шатуна ![]() м. При заданном угле
м. При заданном угле ![]() вычислить:
вычислить:
1.
угловую скорость шатуна АВ
– ![]() ;
;
2. скорость ползуна В;
3.
рассмотреть положение механизма,
когда ![]() и
и ![]() .
.
|
а |
|
б |
|
|
Рис. 4.7 |
|||
Решение. Вычислим модуль скорости точки А кривошипа:
![]() (м/с).
(м/с).
Направлена скорость перпендикулярно ОА в сторону вращения кривошипа (рис. 4.7, а).
Вектор скорости ползуна ![]() направлен вдоль дорожек. Восстановим
перпендикуляры к векторам
направлен вдоль дорожек. Восстановим
перпендикуляры к векторам ![]() и
и ![]() . Точка МЦС (точка Р) лежит на
их пересечении. Из геометрии задачи вычислим АР и ВР (рис. 4.7,
б).
. Точка МЦС (точка Р) лежит на
их пересечении. Из геометрии задачи вычислим АР и ВР (рис. 4.7,
б).
Имеем:
из ![]()
![]() м;
м; ![]() м;
м;
из ![]()
 м;
м;
![]() м;
м;
![]() м;
м; ![]() м.
м.
Напомним, что угол ![]() . Тогда
. Тогда
 ;
;  ;
; ![]() .
.
Угловая скорость шатуна АВ:
 (с-1).
(с-1).
Если механизм нарисован в масштабе, то АР и ВР измеряются линейкой.
2. Скорость ползуна (скорость в точке В):
![]() (м/с).
(м/с).
Проверим правильность полученных результатов, используя основную теорему кинематики. Имеем (рис. 4.6, б):
угол САВ=![]() ,
,
тогда, согласно основной теореме кинематики, имеем:
![]()
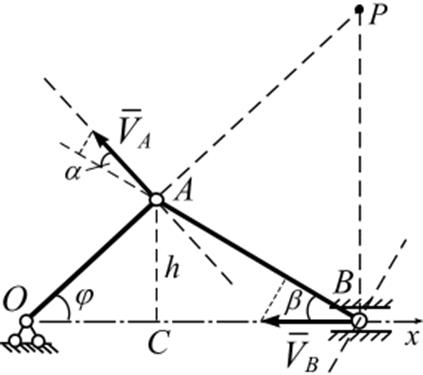
3. Угол ![]() (рис. 4.7, а).
(рис. 4.7, а).
Восстановим перпендикуляры
к векторам ![]() и
и ![]() .
Точка МЦС (точка Р) лежит на их пересечении и совпадает с точкой В.
Следовательно, точка В является в этом положении механизма мгновенным
центром скоростей, тогда
.
Точка МЦС (точка Р) лежит на их пересечении и совпадает с точкой В.
Следовательно, точка В является в этом положении механизма мгновенным
центром скоростей, тогда ![]() . В этом
положении шатун АВ совершает мгновенное вращение вокруг точки В с
угловой скоростью
. В этом
положении шатун АВ совершает мгновенное вращение вокруг точки В с
угловой скоростью
 (с-1).
(с-1).
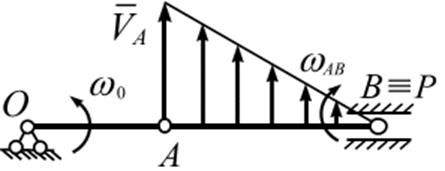
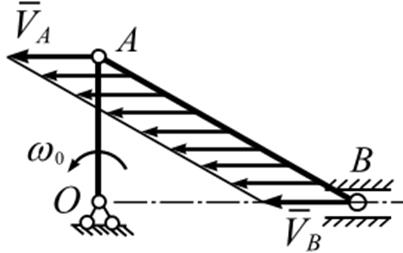
Распределение скоростей шатуна показано на рис. 4.8 а.
Угол ![]() (рис.
4.8, б).
(рис.
4.8, б).
|
а |
|
б |
|
|
Рис. 4.8 |
|||
Скорости ![]() и
и ![]() направлены параллельно друг другу, и
перпендикуляры к ним пересекаются в бесконечности, тогда
направлены параллельно друг другу, и
перпендикуляры к ним пересекаются в бесконечности, тогда  . Следовательно, в этом положении
шатун совершает мгновенно-поступательное движение, и все точки шатуна АВ
имеют одинаковую скорость, равную
. Следовательно, в этом положении
шатун совершает мгновенно-поступательное движение, и все точки шатуна АВ
имеют одинаковую скорость, равную ![]() (м/с).
(м/с).
Ответ: ![]() (с-1);
(с-1); ![]() (м/с).
(м/с).
|
J |
Вспомни теорию |
|
4.3. Ускорение при плоском движении твердого тела
Ускорение какой-либо точки тела при его плоском движении равно векторной сумме ускорения полюса и ускорения этой точки при вращательном движении тела вокруг полюса:
![]() .
.
Здесь:  –
ускорение полюса;
–
ускорение полюса;
 – ускорение
точки В при ее вращении вместе с телом вокруг полюса А:
– ускорение
точки В при ее вращении вместе с телом вокруг полюса А:
нормальная составляющая ускорения направлена
по нормали, т.е. по АВ к полюсу А, и равна  ;
;
касательная составляющая ускорения направлена
^ АВ в сторону дуговой стрелки ![]() и равна
и равна 
Задача 4.3.Кривошип ОА
длиной 60 см вращается ускоренно относительно оси О и приводит в
движение ролик 1 радиусом ![]() см,
который катится без скольжения по неподвижному колесу 2 (рис. 4.9).
Параметры вращения кривошипа в данный момент времени
см,
который катится без скольжения по неподвижному колесу 2 (рис. 4.9).
Параметры вращения кривошипа в данный момент времени ![]() с-1,
с-1, ![]() с-2. Вычислить
угловую скорость
с-2. Вычислить
угловую скорость ![]() и угловое ускорение
и угловое ускорение ![]() ролика, вычислить скорость и
ускорение точки В, находящейся на ролике на расстоянии 10 см от точки А.
ролика, вычислить скорость и
ускорение точки В, находящейся на ролике на расстоянии 10 см от точки А.
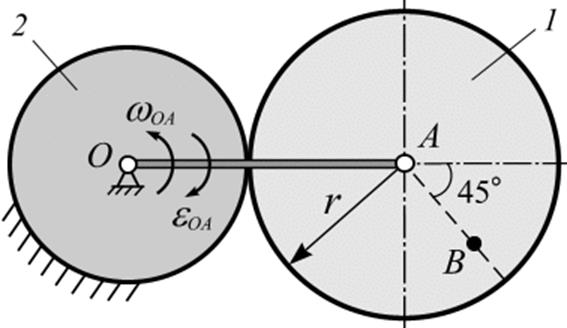
Рис. 4.9
Решение. Кривошип ОА совершает вращательное движение относительно оси, проходящей через неподвижный центр О. Скорость и ускорение точки А кривошипа вычисляют по формулам:
![]() (см/с);
(см/с);
 .
.
Подвижный ролик движется плоскопараллельно. Вычислим ![]() и
и ![]() подвижного
ролика. Плоское движение ролика можно привести к мгновенно-вращательному
движению относительно мгновенного центра скоростей (МЦС), этим центром является
точка касания Р (рис. 4.10).
подвижного
ролика. Плоское движение ролика можно привести к мгновенно-вращательному
движению относительно мгновенного центра скоростей (МЦС), этим центром является
точка касания Р (рис. 4.10).
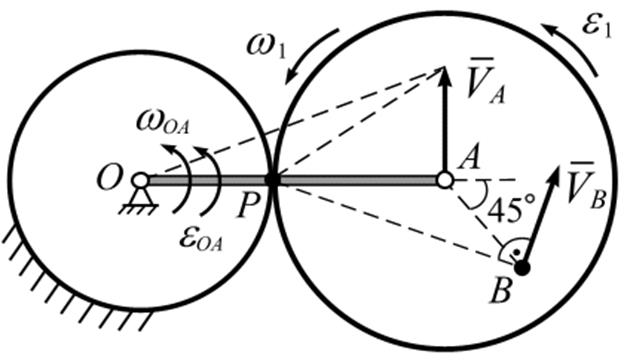
Рис. 4.10
Запишем уравнение связи между движениями кривошипа и ролика. Точка А одновременно принадлежит кривошипу ОА и ролику 1. Следовательно, перемещение точки А:
![]() ,
т.е.
,
т.е.  .
.
Угловая скорость и угловое ускорение ролика 1 тогда вычисляются:
 (с-1);
(с-1);
 (с-2).
(с-2).
Угол вращения ролика относительно точки Р(точка
МЦС), совпадает с углом вращения кривошипа (рис. 4.9). Направления вращения ![]() и
и ![]() ролика
1 совпадают, отмечаем их дуговыми стрелками; следовательно, движение
ролика 1 является ускоренным, как и кривошипа ОА.
ролика
1 совпадают, отмечаем их дуговыми стрелками; следовательно, движение
ролика 1 является ускоренным, как и кривошипа ОА.
Скорость точки В.
Точка В находится на ролике 1, следовательно, её скорость определяется как скорость точки, вращающейся вокруг МЦС, т.е.точки Р:
![]() .
.
Из геометрии задачи определим по теореме косинусов расстояние ВР:

 (см).
(см).
Тогда скорость точки В:
 (см/с).
(см/с).
Вектор ![]() перпендикулярен
отрезку ВР и направлен в сторону вращения
перпендикулярен
отрезку ВР и направлен в сторону вращения ![]() ролика
(рис. 4.10).
ролика
(рис. 4.10).
3. Ускорение точки В.
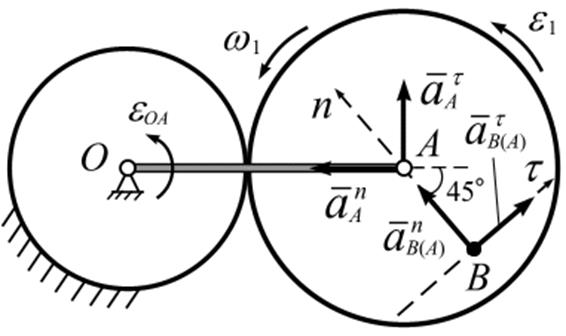
Ускорение точки В складывается из ускорения полюса и ускорения точки В при её вращении вместе с роликом вокруг этого полюса. За полюс примем точку А, т.к. её ускорение известно.
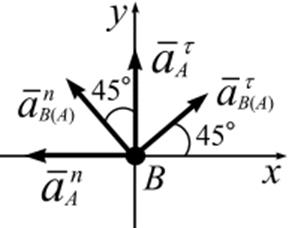
Тогда ускорение точки В запишется (рис. 4.11):
 .
.
|
а |
|
б |
|
|
Рис. 4.11 |
|||
Здесь:
 (см/с2)
- нормальная составляющая ускорения полюса, направлена
от точки А к центру О;
(см/с2)
- нормальная составляющая ускорения полюса, направлена
от точки А к центру О;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.