- коэффициент усиления регулируется от 1 до 1000 с точностью 10-4;
- температурный коэффициент усиления 3 * 10-5 К-1;
- статическая нелинейность во всем диапазоне < 5 * 10-5;
- искажения на частоте 1 кГц < 10-4;
- входной импеданс 108 Ом//100 пФ, выходное сопротивление 0,1 Ом;
- ширина полосы 100 кГц;
- время установления (с точностью 0,1% от установившегося значения) 80 мкс;
- коэффициент ослабления синфазного сигнала
106 на частотах ниже 50 Гц,
104 на частотах ниже 1 кГц;
- температурная чувствительность напряжения сдвига 1мкВ/К;
- температурная чувствительность входного тока смещения 0,5 нА/К.
Нет смысла неограниченно увеличивать коэффициент усиления измерительной системы. Из-за шумов и (аддитивных) помех быстро будет достигнут порог чувствительности системы. С помощью фильтрации этот порог можно несколько сместить вниз. Если частотные спектры шума и помех лежат, в основном, выше спектра измеряемого сигнала, то применяется фильтр нижних частот. Если частоты помех, в основном, ниже интересующего нас диапазона частот (например, фон силовой сети), то для повышения порога чувствительности системы можно применить фильтр верхних частот. Оба типа фильтрации можно объединить в полосовом фильтре. Наконец, если сигналы помех занимают малую полосу в пределах спектра сигнала, то можно применить заграждающий фильтр, который подавит малую долю спектра сигнала.
Фильтрация сигнала может вызвать нежелательные эффекты, что иллюстрируется осциллограммами, показанными на рис. 3.44. Исходный сигнал (а), полученный в результате измерения, содержит шум. Основная часть спектра шума лежит выше частотного диапазона сигнала и поэтому сигнал пропускается через фильтр нижних частот с частотой среза 100 кГц по уровню ?3 дБ. Осциллограммы, приведенные на рис. 3.44(b), (с) и (d) показывают эффективность фильтрации; сигналы почти не содержат шума. Однако ясно, что фильтрация повлияла на верность или качество воспроизведения формы сигнала. В большинстве случаев вид отфильтрованного сигнала отличается от того, который показан на рис.(а), несмотря на то, что все они получены путем пропускания через фильтры нижних частот с одной и той же частотой среза. Различия вызваны типом применяемого фильтра. Другой эффект, заслуживающий внимания, – это задержка, вносимая фильтром. Задержка также зависит от типа используемого фильтра. К сожалению, подробное рассмотрение фильтров и их применений выходит за рамки данного введения в теорию и технику измерений.
Как было установлено, фильтрация может значительно понизить порог чувствительности измерительной системы (при условии, что она выполнена правильно). Во многих случаях можно достичь гораздо лучших результатов, применяя синхронное или когерентное детектирование. Усилитель, в котором используется этот принцип детектирования, обнаружит и «захватит» фазу сигнала. Поэтому он называется «синхронным» усилителем.
Философия, лежащая в основе применения синхронного детектора в измерительной технике, состоит в следующем: предположим, что нашей целью является достижение максимально возможной чувствительности. Измерение выполняется так, что частотный спектр измеряемого сигнала сужен, насколько это возможно. С помощью полосового фильтра можно удалить те ненужные составляющие спектра, которые содержат только шум и помехи. Применяя такую методику «до бесконечности» мы получим в результате пропускания измеряемого сигнала через сверхузкополосный фильтр синусоидальный сигнал. Необходимая минимальная ширина полосы фильтра определяется желательным временем отклика прибора. После того, как измеряемый сигнал подключен или (резко) изменился, нам необходимо ждать, пока в системе не затухнут переходные процессы и не будет достигнуто установившееся состояние.
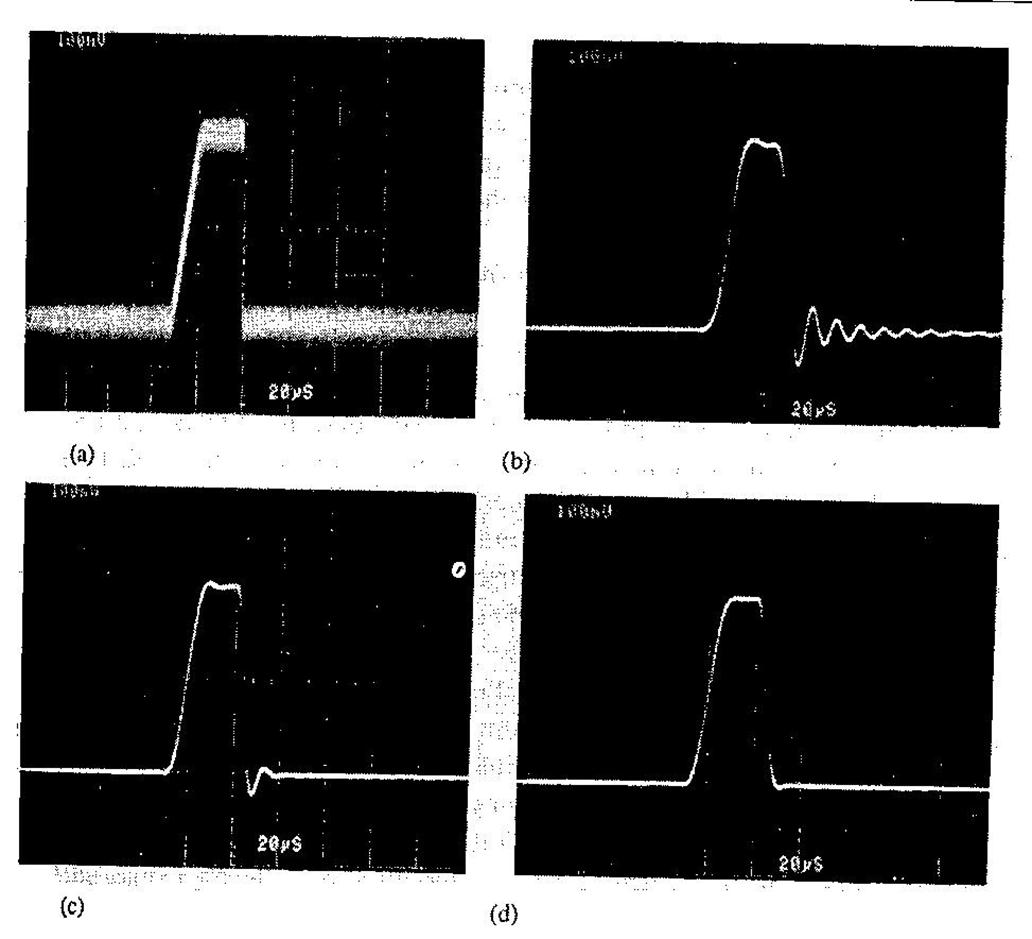
Рис. 3.44. Эффект фильтрации зашумленного сигнала, (а) Исходный сигнал. Сигналы (b), (с) и (d) получены путем фильтрации сигнала (а) различными фильтрами нижних частот, каждый из которых имеет частоту среза 100 кГц по уровню 3 дБ. Тип фильтра в каждом случае разный: (b) эллиптический фильтр (7 полюсов, 6 нулей); (с) фильтр Баттерворта (четвертого порядка); (d) фильтр Бесселя (четвертого порядка). Следует обратить внимание на (линейное) искажение импульса и задержку, которые вносятся различными фильтрами. (Масштаб: по вертикали - 100 мВ/дел, по горизонтали - 20 мкc/дел).
Чем уже полоса частот фильтра, тем дольше это будет происходить. Кроме того, фильтр должен быть в состоянии пропустить модулированный сигнал (то есть сигнал, который несет измерительную информацию). Боковые полосы в частотном спектре, возникающие при модуляции сигнала, не должны подавляться фильтром, иначе информация теряется. Итак, имея в виду эти ограничения, с учетом которых необходимо применять фильтрацию, нам надо определить амплитуду (почти) синусоидального сигнала известной частоты. Если мы знаем фазу этого сигнала (имея в распоряжении опорный сигнал той же частоты), то все, что требуется определить – это составляющая измеряемого сигнала, находящаяся в фазе с опорным сигналом. Шумы и помехи, присутствующие в пределах полосы пропускания фильтра, не находятся в одной фазе с опорным сигналом и поэтому не обнаруживаются. Не обнаруживаются даже составляющие сигнала, имеющие фазу, отличную от фазы опорного сигнала. Можно доказать, что этот метод детектирования является оптимальным (при условиях, отмеченных выше).
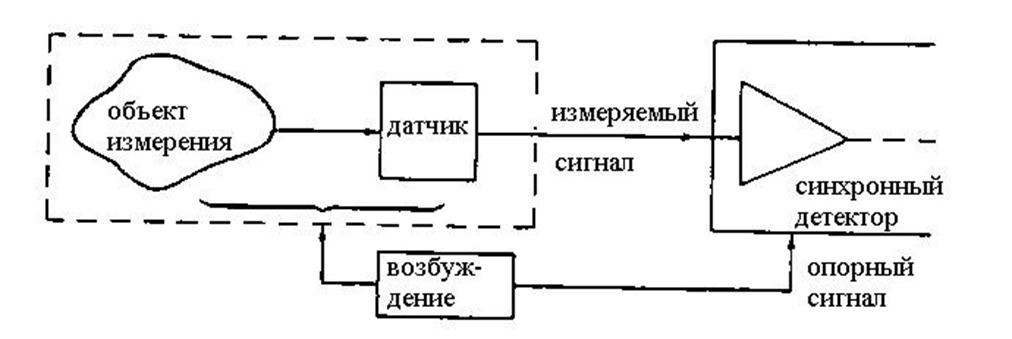
Рис. 3.45. Применение синхронного детектирования в измерениях с целью достижения минимально возможного порога чувствительности.
Структура системы, в которой применяется синхронное детектирование, приведена на рис. 3.45. Рисунок показывает, что синхронному усилителю (в котором осуществляется синхронное детектирование) требуется опорный сигнал, который содержит необходимую информацию о частоте и фазе входного сигнала. Этот опорный сигнал, обычно синусоидальной или прямоугольной формы, генерируется вне усилителя и поступает от измеряемого объекта или подается на него. Если объект измерения сам не генерирует этот сигнал, то он реагирует на него, вырабатывая выходной сигнал, который служит мерой исследуемой величины. Этот процесс «возбуждения» можно также применять во входных преобразователях.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.