 и
и  .
.
Очевидно, что зависимость С=С(х) нелинейна. Входная величина х входит в выражение для С с отрицательным знаком. Можно показать, что выходное напряжение V0 трансформаторного моста пропорционально разности емкостей конденсаторов С и С’:
 .
.
Подстановка значений С и С’ дает:
 .
.
Использование в этом примере двух емкостных преобразователей смещения в балансной схеме, позволяет достичь идеальной линейности. Поэтому мы можем записать:
![]() .
.
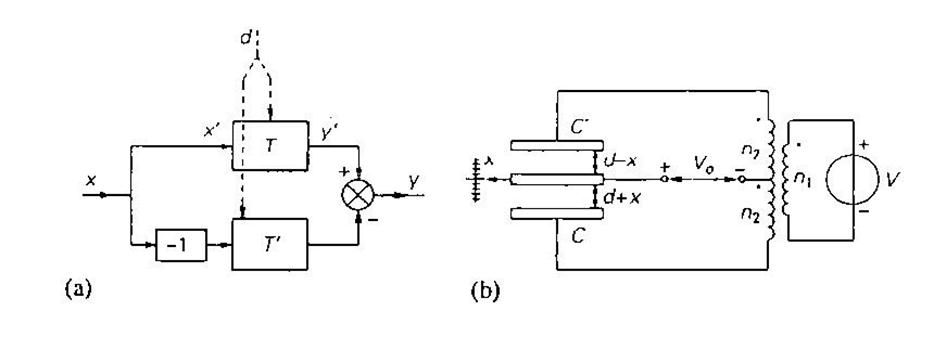
Рис. 3.1. (а) Балансная схема преобразователя, Т и Т’ – два одинаковых преобразователя. (b) Применение балансной схемы в емкостном датчике смещения.
Чувствительность S
определяется как ![]() . Чувствительность моста
определяется напряжением источника питания V.
. Чувствительность моста
определяется напряжением источника питания V.
Другой обычно используемой конфигурацией является схема с обратной связью, состоящая из двух преобразователей Т1 и Т2 (см. рис. 3.2). Назначением системы является преобразование входного сигнала х в электрический выходной сигнал у. Для этого можно воспользоваться единственным преобразователем Т1. Предположим, однако, что Т1 не подходит для непосредственного использования из-за недопустимо большой нелинейности и слишком высокой чувствительности к помехам. Если у нас есть второй преобразователь, способный выполнять обратное преобразование (преобразовывать у в х), и это преобразование линейное и невосприимчиво к помехам, то, объединяя оба преобразователя Т1 и Т2 (с усилителем А для увеличения петлевого усиления) в схему с обратной связью, как показано на рис. 3.2(а), мы можем реализовать составной преобразователь для преобразования измеряемого сигнала х в сигнал у с такими же характеристиками, как у использованного обратного преобразователя (см. раздел 2.3.3.3). Необходимыми условиями достижения такого результата являются большой коэффициент петлевого усиления и квазистатический динамический режим элементов Т1, Т2 и А. Однако на практике динамическая характеристика, особенно у преобразователей Т1 и Т2, часто имеет более высокий порядок, поэтому ситуация оказывается не столь идеальной, как описано выше.
Рис. 3.2(b) иллюстрирует применение обратной связи в акселерометре. Входная величина, ускорение х, оказывает усилие на подвижную массу, соединенную со «звуковой катушкой» электродинамического выходного преобразователя. Ускорение приводит массу в движение. Это движение определяется датчиком смещения (здесь – разностный конденсатор). Выходной сигнал датчика смещения усиливается и подается в виде тока на катушку выходного преобразователя Т2, противодействуя изменению положения подвижной массы. Поэтому, если коэффициент усиления А велик, то масса будет едва смещаться. Таким образом, передаточная характеристика акселерометра определяется соотношением между током I, протекающим по звуковой катушке и тем усилием, которое катушка оказывает на подвижную
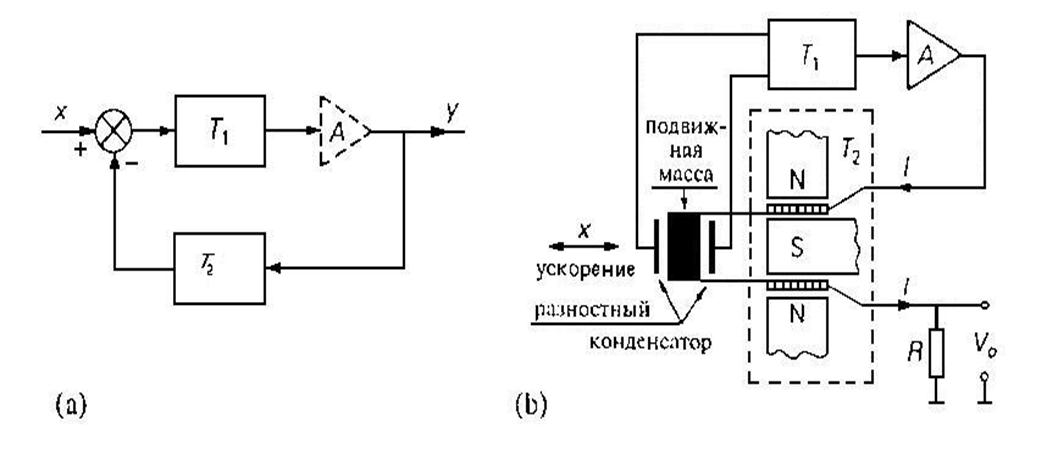
Рис. 3.2. (а) Схема с отрицательной обратной связью. Т1 выполняет желаемое преобразование х в у, а Т2 осуществляет обратное преобразование. (b) Применение обратной связи в акселерометре.
массу, воспринимающую ускорение. Ток I можно преобразовать в выходное напряжение V0 с помощью резистора R.
В преобразователе такого типа входная величина автоматически компенсируется внутренней величиной с помощью цепи отрицательной обратной связи, поэтому его часто называют компенсационным датчиком.
Входной диапазон большинства преобразователей мал, динамический диапазон часто не превышает величины 3 – 10. Для тех случаев, где этого недостаточно, можно объединить вместе несколько преобразователей, имеющих различные входные диапазоны, с целью обеспечить более широкий входной диапазон. При превышении измеряемой величиной входного диапазона одного преобразователя вступает в действие следующий преобразователь. В такой «релейной конструкции» все преобразователи должны иметь одинаковую чувствительность, иначе общая передаточная характеристика становится разрывной. Кроме того, отдельные преобразователи должны очень хорошо выдерживать перегрузки по входу.
Наконец, часто проблемой является надежность преобразователя. Иногда это решается путем применения нескольких преобразователей, вместе измеряющих одну и ту же величину. Поскольку между выходными сигналами преобразователей остаются различия в некотором заданном допустимом интервале, окончательным результатом измерения является среднее значение отдельных выходных сигналов. Если, однако, один из выходов существенно отличается от остальных, то сигнал соответствующего преобразователя исключается из выходного сигнала. При использовании n преобразователей, до n – 2 из них могут быть повреждены, прежде чем система действительно становится непригодной. Такая «дублирующая конструкция» значительно улучшает надежность системы, увеличивая, конечно, стоимость.
Перед рассмотрением различных принципов преобразования необходимо сделать полезное заключительное замечание. Динамику линейного преобразователя можно легко описать, используя его электрический аналог. Проиллюстрируем это на примере. На рис. 3.3(а) показан электродинамический преобразователь, который можно считать линейным для малых отклонений мембраны. Предполагая, что давление окружающего воздуха, действующего на мембрану, изменяется по синусоидальному закону (при использовании преобразователя в качестве микрофона), можно ввести комплексные обозначения. Сила F, действующая на мембрану, приводит ее в движение со скоростью Vm.. Это движение создает на выводах катушки напряжение V, которое, в свою очередь, вызывает ток I, протекающий через сопротивление нагрузки. Мы можем рассматривать преобразователь как неоднородный линейный четырехполюсник; это означает, что соответствующие величины (V- и I- величины) на входе и выходе четырехполюсника имеют разную размерность. Связь между входными и выходными величинами задается следующими двумя передаточными уравнениями:
Предположим на время, что преобразователь идеальный, а
именно, что у катушки нет электрического сопротивления, емкости и самоиндукции,
а мембрана абсолютно гибкая и не имеет массы и трения. Применяя к катушке,
находящейся в постоянном магнитном поле с индукцией В, закон об электромагнитной
индукции Фарадея, получаем: ![]() , где n
– число витков, а l – длина одного витка. Сила Лоренца, действующая на
катушку, равна
, где n
– число витков, а l – длина одного витка. Сила Лоренца, действующая на
катушку, равна ![]() , поэтому
, поэтому
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.