При введении добавочного резистора (Rдоб1, Rдоб2, Rдоб3) в цепь якоря жесткость механических характеристик уменьшается и уменьшается Mк, как изображено на рис.13.3.4.
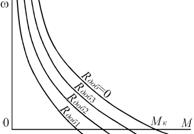
Рис.13.3.4 Реостатные механические характеристики ДПТ последовательного возбуждения
Длительная работа на реостатных характеристиках сопряжена со значительными потерями энергии в добавочных резисторах.
Более экономичным является способ регулирования скорости двигателя путем изменения напряжения питания. Механические характеристики двигателя, соответствующие этому способу регулирования, показаны на рис.13.3.5.
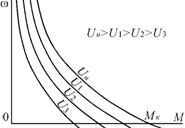
Рис.13.3.5 Механические характеристики ДПТ последовательного возбуждения при изменении напряжения питания
Механические характеристики двигателя при реостатном регулировании и при регулировании напряжением похожи (рис.13.3.4 и 13.3.5). Однако при реостатном регулировании есть дополнительные потери в сопротивлениях, а при регулировании напряжением этих потерь нет.
При регулировании скорости двигателя сопротивлением, шунтирующим обмотку якоря (рис.13.3.6), ток возбуждения содержит постоянную составляющую и двигатель приобретает свойства машины смешанного возбуждения – независимого и последовательного. Благодаря независимой составляющей возбуждения, механические характеристики приобретают большую жесткость и смещаются в сторону отрицательных моментов, как изображено на рис.13.3.6.
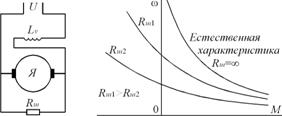
Рис.13.3.6 Схема и механические характеристики ДПТ последовательного возбуждения при шунтировании обмотки якоря
При работе двигателя по схеме рис.13.3.6 ток возбуждения увеличивается на величину тока в шунтирующем сопротивлении Rш. Механические характеристики становятся более жесткими. При отрицательных моментах на валу двигатель может работать в режиме рекуперации энергии.
Для двигателей последовательного возбуждения характерны два режима торможения: противовключением и динамический. В режиме противовключения необходимо включение добавочного резистора в цепь якоря.
Одним из примеров применения электроприводов с ДПТ независимого возбуждения являются гребные электрические установки атомных ледоколов типа “Арктика”.
Основная
[1] Башарин А. В., Новиков В. А., Соколовский Г. Г. Управление электроприводами. Учебное пособие для ВУЗов. – Л., Энергоатомиздат, 1982. -392 с.
[2] Башарин А. В., Постников Ю. В. Примеры расчета автоматизированного электропривода на ЭВМ. Учебное пособие для ВУЗов. – Л., Энергоатомиздат, 1990. -512 с.
[3] Водовозов В. М. Электропривод оборудования с программным управлением. Учебное пособие. – Л., ЛЭТИ, 1990. -63 с.
[4] Ключев В. И. Теория электропривода. Учебник для ВУЗов. – СПб., Энергоатомиздат, 1994. -496 с.
[5] Ковчин С. А., Сабинин Ю. А. Теория электропривода. Учебник для ВУЗов. – Л., Энергоатомиздат, 1990. -512 с.
Дополнительная
[6] Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования. –М.: Наука, 1975.
[7] Онищенко Г. Б. Электрический привод. Учебник для ВУЗов. – М., Издательский центр “Академия”, 2006. -288 с.
[8] Пронин, М. В. Силовые полностью управляемые полупроводниковые преобразователи (моделирование и расчет) / Пронин М. В., Воронцов А. Г. –СПб.: ОАО “Электросила”, 2003. –172 с. CD.
[9] Пронин, М. В. Электроприводы и системы с электрическими машинами и полупроводниковыми преобразователями (моделирование, расчет, применение) / Пронин М. В., Воронцов А. Г., Калачиков П. Н., Емельянов А. П. –СПб.: ОАО “Силовые машины” “Электросила”, 2004. –252 с. CD.
[10] Вольдек А. И. Электрические машины. Л., «Энергия», 1974, 840 с.
[11] Костенко М. П., Пиотровский Л. М. Электрические машины. Л., «Энергия», 1958. Ч. I. 464 с. Ч. II., 646 с.
[12] Чиликин М. Г., Ключев В. И., Сандлер А. С. Теория автоматизированного электропривода. М., “Энергия”, 1979. 616 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.