Так как
![]() (3.1.11)
(3.1.11)
то
![]() . (3.1.12)
. (3.1.12)
Суммарный, приведенный к валу двигателя, момент инерции
![]() . (3.1.13)
. (3.1.13)
где Jрот, Jр, Jб моменты инерции ротора двигателя, редуктора (со стороны двигателя), барабана.
Уравнение движения электропривода в режиме подъема
![]() . (3.1.14)
. (3.1.14)
Если все элементы рассматриваемой системы имеют равные
или пропорциональные скорости, то такая система рассматривается как жесткая с
суммарным моментом инерции ![]() . Такая система
называется также одномассовой.
. Такая система
называется также одномассовой.
Во многих случаях кинематическая схема рабочей машины содержит упругие звенья – длинные валы, тросы, упругие муфты. В этих случаях системы описываются как многомассовые.
Реальные механические передачи всегда имеют погрешности, обусловленные неточностями изготовления редукторов, эксцентриситетом вращающихся конструкций, несоосностью валов при их стыковке муфтами и т. д.
В большинстве случаев вращающиеся устройства имеют циклическую погрешность. Коэффициент механической передачи i таких устройств может быть представлен в виде ряда постоянной и гармонических составляющих:
![]() . (3.2.1)
. (3.2.1)
где
i0 – постоянная
составляющая коэффициента передачи, ![]() – амплитуда
переменной составляющей с номером n,
– амплитуда
переменной составляющей с номером n, ![]() –
угол поворота вала.
–
угол поворота вала.
В ряде случаев при расчетах механических систем
учитывается упругость механических связей. Например, принимается, что жесткость
гибкого вала C находится
в следующем соответствии с вращающим моментом М и углом изгиба вала ![]()
![]() . (3.2.1)
. (3.2.1)
На самоходных шахтных вагонах, большегрузных самосвалах, на некоторых трамваях используются тяговые электроприводы с раздельным управлением правыми и левыми колесами. Двигатели этих колес могут находиться в различных условиях, и при работе одних машин в режиме тяги другие могут работать в режиме торможения. Условия усложняются при движении по местности с подъемами, спусками, поворотами. Между двигателями возникает обмен энергией, возможны колебания. Упрощенная функциональная схема системы приводов шахтного вагона, а также фотографии основного оборудования представлены на рис.3.3.1.

Рис.3.3.1 Функциональная схема приводов шахтного вагона
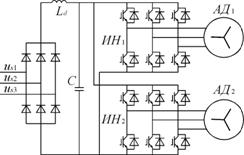
Рассматриваемый комплект приводов шахтного вагона содержит следующее основное оборудование: выпрямитель (100 кВт, напряжение питания 660 В, 50 Гц), два транзисторных инвертора напряжения (по 50 кВА), два асинхронных тяговых двигателя (по 40 кВт), асинхронный двигатель конвейера (22 кВт). На рис.3.3.2 изображена упрощенная схема тягового электропривода.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.