Изменение величин, характеризующих механическое движение, происходит под действием сил F при линейном движении и моментов M при вращательном движении. Момент создается силой, приложенной к плечу R
![]() . (2.3.1)
. (2.3.1)
Рис.2.3.1 поясняет связь момента и силы или пары сил на примерах барабана грузоподъемной лебедки и электродвигателя.
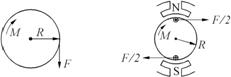
Рис.2.3.1 Схемы формирования крутящего момента в барабане грузоподъемной лебедки и в электродвигателе
Одно из направлений движения обычно принимается за положительное (“Вперед”), противоположное направление принимается за отрицательное (“Назад”). Если рассматривается вращательное движение, то различают вращение по часовой стрелке и против часовой стрелки, если, например, смотреть на двигатель со стороны нагрузки. В соответствии с выбранными направлениями присваиваются знаки силам, моментам, скоростям, ускорениям.
При вращательном движении момент электродвигателей обычно зависит от скорости. Эти зависимости представляют собой механические характеристики электродвигателей (электроприводов). Они изображаются обычно в координатах M-ω.
Оси координат разделяют поле на 4 квадранта, как изображено на рис.2.3.2 (возможны и другие направления осей).
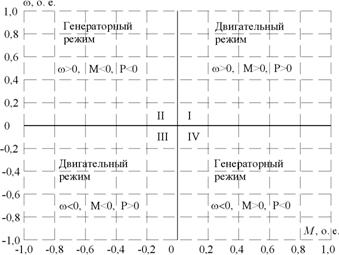
Рис.2.3.2 Поле координат M-ω
Наиболее часто для представления механических характеристик используется I квадрант, в котором электромагнитный момент двигателя и частота вращения положительны. В реверсивных электроприводах в III квадранте привод также работает в двигательном режиме. Во II и в IV квадранте привод работает в генераторном режиме и, если мощность на валу превышает потери энергии в электроприводе, осуществляется рекуперация (возврат) энергии в питающую электросеть.
Режим потребления или рекуперации энергии в первом приближении определяется знаком мощности
![]() . (2.3.2)
. (2.3.2)
В большинстве случаев генераторных режим работы электроприводов кратковременный и связан с торможением электродвигателей. Различают рекуперативное торможение, динамическое торможение и торможение противовключением.
Режим рекуперативного торможения. В этом режиме кинетическая энергия движущихся масс или потенциальная энергия нагрузки преобразуется двигателем в электроэнергию и за вычетом потерь передается в питающую электросеть.
Режим динамического торможения. В этом режиме двигатель отключается от источника питания и замыкается накоротко или на резисторы. Механическая энергия преобразуется двигателем в электрическую и расходуется в самом двигателе и во внешних резисторах.
Режим противовключения. В этом режиме при какой-либо определенной частоте вращения двигателя осуществляется такое переключение цепей питания, которое соответствует обратному направлению вращения. При этом в двигателе образуется тормозной момент и возникают дополнительные потери энергии.
Основным параметром, определяющим вид механической характеристики, является ее жесткость (рис.2.3.3)
![]() , (2.3.3)
, (2.3.3)
где ΔM – приращение момента, Δω – приращение скорости.
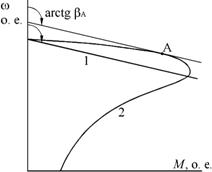
Рис.2.3.3 К определению жесткости механических характеристик
Если механическая характеристика прямолинейна (1), то ее жесткость постоянна и равна тангенсу угла наклона к оси скорости. Если характеристика криволинейна, то ее жесткость равна тангенсу угла наклона к оси скорости касательной в заданной точке, например, в точке А.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.