![]() (4.3.1)
(4.3.1)
Разделив числитель и знаменатель выражения (2.3.1) на скольжение, найдем
 (4.3.2)
(4.3.2)
Такая формальная математическая операция не изменяет значения и фазы вектора тока ротора и может быть истолкована как операция приведения вращающегося ротора к неподвижному. В приведенной неподвижной обмотке ротора активное сопротивление равно R2/s.
Другая особенность приведения обмотки ротора к обмотке статора заключается в наличии между ними трансформаторных связей. Обмотки в общем случае имеют различное количество витков w1 и w2. В отличие от трансформаторов, обмотки машин выполняются распределенными, с сокращением шага, со скосом пазов в статоре и роторе и для учета этих конструктивных особенностей используются: обмоточный коэффициент статора Kоб1, обмоточный коэффициент ротора Kоб2, коэффициент скоса Kc. С учетом указанных особенностей машин коэффициент трансформации и приведения параметров и переменных обмотки ротора к обмотке статора
![]() , (4.3.3)
, (4.3.3)
где m1 – число фаз обмотки статора, m2 – число фаз обмотки ротора.
В схемах замещения асинхронных двигателей используются приведенные параметры
![]() (4.3.4)
(4.3.4)
Схема замещения асинхронного двигателя для одной фазы изображена на рис.4.3.2.
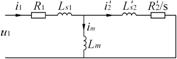
Рис.4.3.2 Т-образная схема замещения асинхронного двигателя
Схему рис.4.3.2 называют Т-образной схемой замещения асинхронного двигателя. В ней параметры обмотки ротора, приведенные к статорной обмотке, имеют обозначения со штрихом.
В схеме замещения типичные значения параметров
находятся в пределах (в относительных единицах): индуктивность намагничивания Lm=1-4 о.е., индуктивность рассеяния обмотки
статора Ls1=0,05-0,15 о.е.,
индуктивность рассеяния обмотки ротора ![]() =0,05-0,15 о.е.,
активное сопротивление фазы обмотки статора R1=0,005-0,05 о.е.,
=0,05-0,15 о.е.,
активное сопротивление фазы обмотки статора R1=0,005-0,05 о.е., ![]() =0,005-0,05 о.е., s=0,005-0,05
(меньшие значения активных сопротивлений и скольжения относятся к более мощным
машинам).
=0,005-0,05 о.е., s=0,005-0,05
(меньшие значения активных сопротивлений и скольжения относятся к более мощным
машинам).
Индуктивности рассеяния мало зависят от режима работы машины. Индуктивность намагничивания обычно существенно зависит от насыщения стали основным магнитным потоком. Активные сопротивления существенно зависят от температуры. Сопротивление медных обмоток изменяется на 40 % при изменении температуры на 100ºС. Активные сопротивления обмотки ротора обычно зависят от частоты тока и при пуске двигателей при изменении частоты тока в роторе от номинальной до частоты скольжения активные сопротивления могут изменяться в несколько раз.
Наряду с Т-образной схемой, используется также более удобная для анализа Г-образная схема замещения асинхронного двигателя, которая изображена на рис.4.3.3. В ней ветвь намагничивания вынесена на зажимы двигателя.

Рис.4.3.3 Г-образная схема замещения асинхронного двигателя
Рассмотренные схемы замещения можно преобразовать, с целью
выделения мощности, расходуемой на тепловые потери в роторе, и мощности,
которая преобразуется в механическую и передается в нагрузку. Это
осуществляется путем разделения приведенного активного сопротивления ![]() на составляющие, как указано на рис.4.3.4.
на составляющие, как указано на рис.4.3.4.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.