Электроприводы с асинхронными двигателями с фазным ротором и полупроводниковыми преобразователями применяются в различных областях техники. Одно из применений этих систем – подруливающие устройства судов. Эти приводы имеют небольшую мощность по сравнению с главным движением и используются преимущественно при швартовке судов, когда использование главного движения затруднено или невозможно.
На рис.8.3.1 изображена схема подруливающего устройства мощностью 500 кВт. Такие устройства разработаны на заводе “Электросила” в 1970-х годах и поставляются по настоящее время.
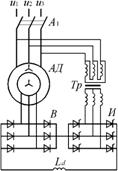
Рис.8.3.1 Подруливающее устройство по схеме асинхронно-вентильного каскада
Статорная обмотка двигателя рис.8.3.1 подключается непосредственно к питающей сети. Под действием напряжений сети un в обмотке статора протекают токи. Им соответствует магнитное поле двигателя, которое вращается с постоянной скоростью. При неподвижном роторе в его обмотке наводятся ЭДС. Они выпрямляются диодным выпрямителем В и выпрямленное напряжение подается на вход инвертора И. При соответствующем управлении инвертором электроэнергия передается от обмотки статора в обмотку ротора, затем через выпрямитель в цепь выпрямленного тока и через инвертор и трансформатор в питающую электросеть. При увеличении частоты вращения ротора уменьшаются частота и величина ЭДС, наводимых в обмотке ротора магнитным полем. Уменьшаются возможности передачи мощности по указанному контуру. При синхронной частоте вращения ротора ЭДС в обмотке ротора не наводятся и мощность по указанному контуру не передается. Уровень мощности в замкнутом контуре (обмотки двигателя – преобразователь частоты – трансформатор) можно регулировать тиристорным инвертором. При этом регулируется и частота вращения ротора. Чем больше мощности отбирает преобразователь от ротора, тем ниже его частота вращения.
При постоянной частоте напряжений питания двигателя скорость вращения ротора определяется числом пар полюсов pп. Предусмотрены специальные исполнения конструкции, позволяющие изменять число пар полюсов и скорость вращения ротора.
Наиболее простым решением является размещение в пазах статора не одной трехфазной обмотки, а нескольких обмоток с различным шагом по пазам, рассчитанных на различное число пар полюсов. При этом частота вращения ротора может изменяться ступенчато путем переключения питания с одной обмотки на другую. Однако такие двигатели имеют большие габариты и низкий КПД.
Чаще для переключения числа пар полюсов используется одна и та же трехфазная обмотка с переключаемыми секциями. Наибольшее распространение получили две схемы обмоток – “звезда-двойная звезда” и “треугольник-двойная звезда”.
На рис.8.4.1 изображены схема статорной обмотки двухскоростного асинхронного двигателя “звезда-двойная звезда”, а также механические характеристики этого двигателя.
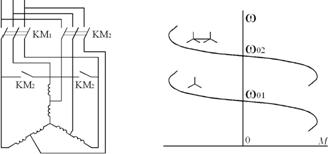
Рис.8.4.1 Схема и механические характеристики двухскоростного асинхронного двигателя со схемой соединения обмоток “звезда-двойная звезда”
В схеме рис.8.4.1 каждая фаза обмотки статора содержит две секции, которые включаются последовательно или параллельно. При параллельном соединении секций напряжения подводятся к средним точкам секций, а их начала замыкаются между собой. Образуются две звезды, соединенные параллельно. Такое соединение соответствует меньшему числу пар полюсов и более высокая частота вращения ротора.
При последовательном соединении секций число пар полюсов увеличивается в 2 раза, что соответствует уменьшению в 2 раза скорости вращения ротора.
При схеме “звезда” двигатель имеет мощность
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.