
Рис.4.3.4 Преобразование схем замещения асинхронного двигателя
На рис.4.3.4 выделяется
составляющая активного сопротивления обмотки ротора ![]() ,
которая соответствует потерям энергии в роторе, а также составляющая
,
которая соответствует потерям энергии в роторе, а также составляющая ![]() , которая соответствует
преобразованию электрической энергии в механическую.
, которая соответствует
преобразованию электрической энергии в механическую.
В соответствии с Г-образной схемой замещения асинхронного двигателя рис.4.3.4 приведенный действующий ток в обмотке ротора определяется выражением
 , (4.4.1)
, (4.4.1)
где
![]() – суммарное индуктивное
сопротивления обмоток статора и ротора.
– суммарное индуктивное
сопротивления обмоток статора и ротора.
Электромагнитная мощность двигателя (мощность, передаваемая через воздушный зазор) пропорциональна квадрату тока, активному сопротивлению роторных контуров и числу фаз обмотки статора
 . (4.4.2)
. (4.4.2)
Электромагнитный момент двигателя определяется отношением электромагнитной мощности к угловой частоте вращения ротора, то есть пропорционален числу пар полюсов p
 . (4.4.3)
. (4.4.3)
Если в выражении (2.4.3) все параметры, кроме
скольжения и электромагнитного момента, принять постоянными, то зависимость ![]() называется механической
характеристикой асинхронного двигателя. Одна из возможных механических характеристик
представлена на рис.4.4.1.
называется механической
характеристикой асинхронного двигателя. Одна из возможных механических характеристик
представлена на рис.4.4.1.
Работа машины при скольжениях 0<s<1 соответствует двигательному режиму. В этом режиме частота вращения ротора ω=ω2 больше 0 и электромагнитный момент М=Мэм также больше 0.
Работа асинхронной машины при скольжениях 1<s<∞ соответствует генераторному режиму. В этом режиме частота вращения ротора ω=ω2 больше 0, а электромагнитный момент отрицателен.
Работа асинхронной машины при скольжениях -∞<s<0 соответствует режиму торможения. В этом режиме частота вращения ротора ω=ω2 меньше 0, а электромагнитный момент положителен.
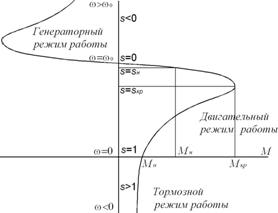
Рис.4.4.1 Механическая характеристика асинхронного двигателя
На механической характеристике имеется ряд характерных точек.
Одна из этих точек – точка холостого хода асинхронной машины. В ней скольжение s равно 0, электромагнитный момент равен 0, а частота напряжения, поданного на обмотку статора равна частоте вращения ротора (при одной паре полюсов).
Другая характерная точка – номинальный режим работы асинхронной машины (при номинальном напряжении питания двигателя). В этой точке скольжение равно номинальной величине sн и электромагнитный момент равен также номинальной величине Mн.
Характерной является точка, в которой электромагнитный момент максимален. Величину этого момента называют критическим моментом асинхронной машины Mкр. Скольжение в этой точке называют критическим скольжением. При увеличении момента сопротивления на валу двигателя скольжение увеличивается и в рассматриваемой точке наступает так называемое опрокидывание двигателя, он останавливается.
При анализе систем с асинхронными двигателями обращают также внимание на еще одну точку, в которой частота вращения ротора равна 0, а электромагнитный момент равен пусковому моменту двигателя Mп.
Критическое скольжение определяются при использовании
выражения (2.4.3) из условия ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.