Из выражения (9.2.4) следует, что по мере увеличения
нагрузки синхронного двигателя угол нагрузки увеличивается и момент двигателя
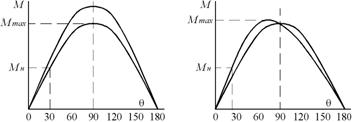
достигает максимума Mmax при ![]() , как изображено
на рис.9.2.3 а). Максимальный момент синхронного двигателя зависит
от напряжения питания U и от тока возбуждения If
, как изображено
на рис.9.2.3 а). Максимальный момент синхронного двигателя зависит
от напряжения питания U и от тока возбуждения If
![]() , (9.2.5)
, (9.2.5)
где Kf – коэффициент.
Исходя из (9.2.5), в большинстве систем автоматического регулирования предусматривается форсированное возбуждение двигателей при приложении ударной нагрузки или снижении напряжения питания.
В неявнополюсных синхронных двигателях, кроме основного момента, обусловленного полем возбуждения, возникает так называемый реактивный момент, обусловленный несимметрией ротора, различием индуктивных сопротивлений по осям d и q.
Активная и реактивная составляющие момента явнополюсного синхронного двигателя образуют результирующий момент
![]() . (9.2.6)
. (9.2.6)
Угловая характеристика явнополюсного синхронного двигателя изображена на рис.9.2.3 б).
а) б)
Рис.9.2.3 Угловые характеристики неявнополюсного и явнополюсного синхронных двигателей
В синхронных машинах традиционного исполнения Xd>Xq и максимальное значение момента Mmax возникает при углах θ<p/2. В синхронных машинах с постоянными магнитами Xd<Xq, поэтому максимальное значение момента Mmax возникает при углах θ>p/2.
При расчетах и анализе электромеханических процессов в синхронных машинах используются схемы замещения по осям d и q. Ось d является осью обмотки возбуждения. Ось q перпендикулярна оси d. Эти оси вращаются вместе с ротором. Токи трехфазной обмотки статора проектируются на вращающиеся оси d и q. Проекции токов id и iq рассматриваются как токи реакции якоря (по аналогии с машинами постоянного тока). Обмотка возбуждения и демпферные системы по осям d и q приводятся к обмотке статора (как в трансформаторах и асинхронных машинах). При этом по осям d и q синхронную машину можно представить схемами замещения, изображенными на рис.9.2.4.
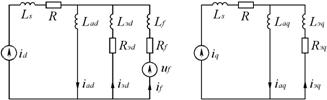
Рис.9.2.4 Схемы замещения синхронного двигателя
В схемах рис.9.2.4: Ls – индуктивность рассеяния обмотки статора, R – активное сопротивление обмотки статора, Lad, Laq – индуктивности намагничивания по продольной и поперечной осям, Lэd, Lэq – индуктивности рассеяния эквивалентных демпферных систем, Rэd, Rэq – активные сопротивления эквивалентных демпферных систем, Lf – индуктивность рассеяния обмотки возбуждения, Rf – активное сопротивление обмотки возбуждения, uf, if – напряжение и ток возбуждения.
Параметры синхронных двигателей задаются обычно в соответствии с рассмотренными схемами замещения. Наиболее употребительными являются следующие величины.
Сверхпереходные индуктивности
 (9.2.7)
(9.2.7)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.