Однако во многих случаях нагрузка связана с валом двигателя через систему передач: редуктор, барабан, трос и др.). Если эти передачи жесткие, не имеют люфтов, то для анализа механического движения можно использовать то же уравнение (1.4.15), но при этом все механические движущиеся звенья должны быть приведены к оси вращения двигателя.
Одним из устройств преобразования механических параметров является редуктор. Схема преобразования с электродвигателем ЭД и редуктором Р представлена на рис.3.1.1. Двигатель имеет момент инерции Jд, частоту вращения ω, момент M. Редуктор имеет коэффициент передачи i, момент инерции со стороны вала двигателя Jp. Нагрузка (например, вентилятор) имеет момент инерции Jв и частоту вращения в i раз меньшую, чем двигатель.

Рис.3.1.1 Приведение параметров нагрузки к валу электродвигателя
Частота вращения вала нагрузки
![]() . (3.1.1)
. (3.1.1)
Приведение параметров нагрузки к валу двигателя осуществляется из условий сохранения кинетической энергии не приведенных и приведенных вращающихся масс нагрузки
![]() . (3.1.2)
. (3.1.2)
Из (1.5.1) и (1.5.2) следует
![]() . (3.1.3)
. (3.1.3)
Суммарный момент инерции вращающихся масс, приведенных к валу двигателя
![]() . (3.1.4)
. (3.1.4)
Приведенный в валу двигателя статический момент сопротивления нагрузки
![]() , (3.1.5)
, (3.1.5)
где η – КПД редуктора.
В некоторых кинематических схемах рабочих машин есть звенья с поступательным движением. Рассмотрим такой случай на примере кинематической схемы грузоподъемной лебедки рис.3.1.2.
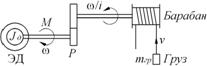
Рис.3.1.2 Кинематическая схема грузоподъемной лебедки
Статический (активный) момент создается силой тяжести груза
![]() , (3.1.6)
, (3.1.6)
где mгр – масса груза, g – ускорение свободного падения.
Этот момент прикладывается к валу барабана лебедки и равен
![]() , (3.1.7)
, (3.1.7)
где Rб – радиус барабана.
Момент сопротивления барабана, приведенный к валу двигателя, в случае подъема
![]() . (3.1.8)
. (3.1.8)
Момент сопротивления барабана, приведенный к валу двигателя, в случае спуска
![]() . (3.1.9)
. (3.1.9)
Момент инерции груза Jгр, приведенный к валу двигателя, определяется из условия равенства кинетических энергий при поступательном и вращательном движении
![]() . (3.1.10)
. (3.1.10)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.