К таким машинам можно отнести многоскоростные асинхронные электродвигатели. Они используются в тех случаях, когда достаточно ступенчатое изменение скорости двигателя, требуется минимальная стоимость оборудования и простота эксплуатации.
В электроприводах небольшой мощности находят применение также однофазные асинхронные двигатели.
При подключении к фазной обмотке ротору асинхронного двигателя активных сопротивлений сохраняется математическое описание машины, приведенное в предыдущих разделах. При этом отличием является только увеличенное активное сопротивление обмотки ротора. Г-образная схема замещения машины, изображенной на рис.8.1.1 а), представлена на рис.8.2.1. В схеме замещения учтены коммутационные аппараты K1 и K2, шунтирующие активные сопротивления в цепи ротора.
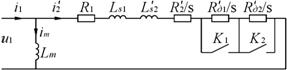
Рис.8.2.1 Схема замещения асинхронного двигателя с фазным ротором
В соответствии со схемой замещения и формулой (4.4.1), дополнительные сопротивления в цепи ротора, в частности Rд1 и Rд2, позволяют ограничить пусковой ток двигателя
 , (8.2.1)
, (8.2.1)
где K1 и K2 – функции состояния коммутационных аппаратов (0 – замкнут, 1– разомкнут).
В соответствии с формулой (4.4.6) дополнительные сопротивления не влияют на критический момент двигателя.
Если активные сопротивления цепей ротора существенно меньше индуктивных сопротивлений, то увеличение активных сопротивлений в роторе приводит к увеличению критического скольжения
![]() (8.2.2)
(8.2.2)
и к увеличению пускового момента
![]() . (8.2.3)
. (8.2.3)
В процессе пуска асинхронного двигателя с фазным ротором по мере изменения частоты вращения ротора изменяются ток, момент и скольжение и изменяются состояния коммутационных аппаратов, шунтирующих сопротивления в цепи ротора. Эти изменения отражены на рис.8.2.2.
В начале процесса пуска коммутационные аппараты K1 и K2 разомкнуты и в цепи ротора включены добавочные сопротивления Rд1 и Rд2. Разгон двигателя осуществляется по реостатной механической характеристике с начальным пусковым моментом двигателя, равным M2 на рис.8.2.2.
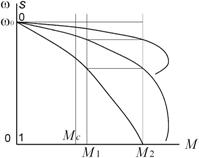
Рис.8.2.2 Диаграмма пуска асинхронного двигателя с фазным ротором при использовании коммутируемых активных сопротивлений
На некоторой частоте вращения ротора, на которой двигатель развивает момент M1, замыкаются коммутационные аппараты K2 и шунтируют сопротивления R2. При этом двигатель переключается на другую реостатную характеристику, момент двигателя скачкообразно увеличивается до значения M2 и разгон продолжается с большим моментом двигателя. В процессе разгона момент двигателя уменьшается и снова достигает величины M1. В этой точке замыкаются контакты аппарата K1, которые шунтируют сопротивления R1. При этом происходит скачкообразный переход на естественную механическую характеристику двигателя. По этой характеристике разгон осуществляется до точки, в которой момент двигателя равен моменту сопротивления Mс. Переключения коммутационных аппаратов могут осуществляться по заданным временам работы ступеней сопротивлений, по частоте вращения ротора, по величине пускового тока. При выборе сопротивлений R1 и R2 и способа переключений следует стремиться к тому, чтобы на искусственных и естественной механических характеристиках в точках переключения моменты M1 были одинаковы. Моменты M2 на этих характеристиках также должны быть одинаковы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.