![]() . (4.4.4)
. (4.4.4)
В нормальных асинхронных машинах R1<<Xs. Это позволяет упростить выражение (2.4.4)
![]() . (4.4.5)
. (4.4.5)
Критический момент определяется из (2.4.3) и (2.4.5)
![]() . (4.4.6)
. (4.4.6)
В (2.4.4)-(2.4.6) знак + относится к двигательному режиму, знак – относится к генераторному режиму рекуперативного торможения.
Отношение максимального момента к номинальному называют перегрузочной способностью двигателя
![]() . (4.4.7)
. (4.4.7)
Пусковой момент определяется из (2.4.3) при s=1
![]() . (4.4.8)
. (4.4.8)
При использовании выражений для определения критических момента и скольжения формулу (2.4.3) можно преобразовать
 , (4.4.9)
, (4.4.9)
где
![]() .
.
Выражение (4.4.9) называют формулой Клосса. Если пренебречь величиной R1, то формула Клосса принимает вид
 . (4.4.10)
. (4.4.10)
Механические характеристики асинхронных двигателей зависят от многих факторов – от напряжения питания, от частоты напряжения, от параметров схемы замещения. Эти зависимости определяются приведенными выше выражениями (2.4.3)-(2.4.10).
При постоянных параметрах схемы замещения асинхронной машины и неизменной частоте напряжений питания зависимость механических характеристик асинхронных двигателей от напряжения питания U1 определяется выражением (2.4.3) с учетом (2.4.4), (2.4.6) и (2.4.8). В частности, из (2.4.6) и (2.4.8) видно, что критический и пусковой моменты асинхронного двигателя пропорциональны квадрату действующего напряжения питания. Из (2.4.4) видно, что критическое скольжение не зависит от напряжения питания. Построенные в соответствии с этим механические характеристики асинхронного двигателя при различных напряжениях питания U=KUн (K – кратность напряжения по отношению к номинальному Uн) представлены на рис.4.5.1.
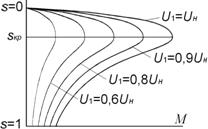
Рис.4.5.1 Механические характеристики при изменении напряжения питания
Во многих электроприводах асинхронные двигатели питаются от преобразователей частоты. Поэтому представляет интерес зависимость механических характеристик двигателя от частоты напряжений питания. При изменении частоты напряжений смещается точка пересечения механической характеристики M=f(ω) с осью ординат (точка холостого хода), как изображено на рис.4.5.2. При этом увеличиваются пусковой и критический моменты в соответствии с формулами (2.4.8) и (2.4.6).
Следует отметить, что при уменьшении частоты напряжения питания уменьшаются индуктивные сопротивления и, в том числе, сопротивления цепи намагничивания (см. рис.4.3.2-4.3.4). При неизменном действующем напряжении питания увеличивается ток намагничивания и возрастает магнитный поток. Электрические машины рассчитываются обычно на определенный магнитный поток, значительные запасы по величине магнитного потока, как правило, не предусматриваются. Поэтому возможности уменьшения частоты напряжений при неизменном их действующем значении, как правило, весьма ограничены.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.