 (6.44)
(6.44)
Сопротивления ступеней:
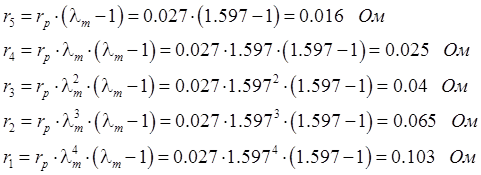 (6.45)
(6.45)
Выбор сопротивлений будем проводить по значению эквивалентного длительного тока ступени. Так как режим работы крана легкий, то принимаем ПВ первой ступени ПВ1 = 12,5%.
Полное сопротивление реостата:
 (6.46)
(6.46)
Для остальных ступеней ПВ определяется следующим образом:
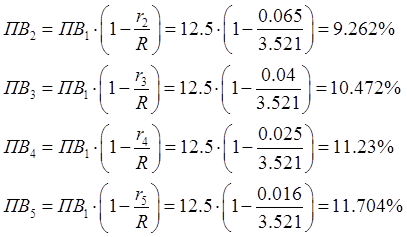 (6.47)
(6.47)
Эквивалентная длительная сила тока каждой ступени:
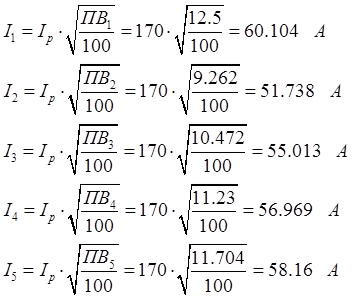 (6.48)
(6.48)
По найденным значениям токов и ранее рассчитанным сопротивлениям подбираем по [4, табл. 7.9] нормализованные блоки резисторов типа БФ6 и блоком резисторов ИРАК 434332.004-03.
Расчет и построение естественной и искусственных характеристик будем производить для двигательного режима в I квадранте по приближенной формуле:
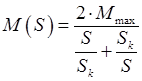
Зная, что номинальный момент равен Мн = 729,51 Н∙м и максимальный момент Mmax = 2160 Н∙м (табл. 3), найдем кратность максимального момента:
 (6.49)
(6.49)
Критическое скольжение для естественной характеристики:
![]() (6.50)
(6.50)
Для построения искусственных механических характеристик сначала определяем скольжение при введении в цепь ротора каждой ступени сопротивления:
 (6.51)
(6.51)
Критическое скольжение для каждой характеристики:
 (6.52)
(6.52)
Между скольжением и угловой скоростью существует зависимость:
![]()
Задаваясь значениями скольжения от 0 до 1 строим естественную и искусственные механические характеристики ω = f(М). Все должно располагаться в первом квадранте.
Механические характеристики для механизма главного подъема приведены на рис. 6.4.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
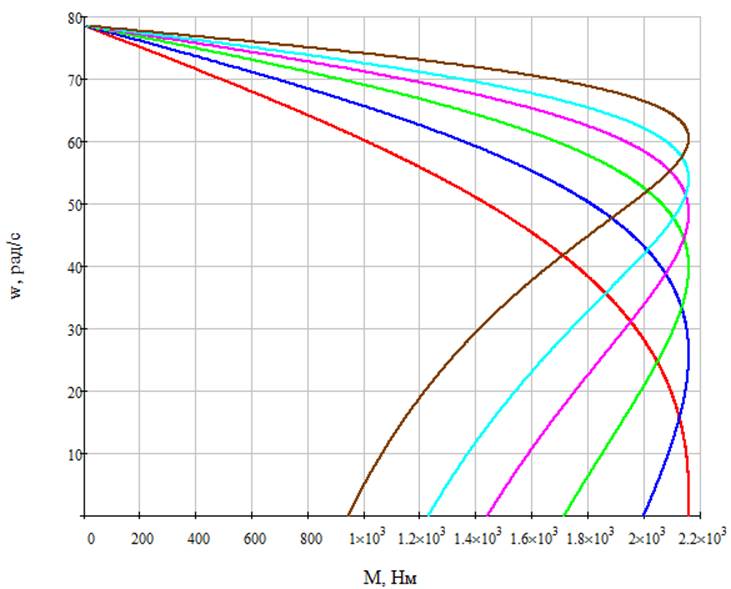
Рис. 6.4. Механические характеристики механизма передвижения крана: 1 – естественная характеристика; 2,3,4,5,6 – искусственные характеристики при введении добавочных сопротивлений.
Принципиальная схема приводится для одного из механизмов крана. В частности на рис. 7.1 приведена схема управления механизмом передвижения крана.
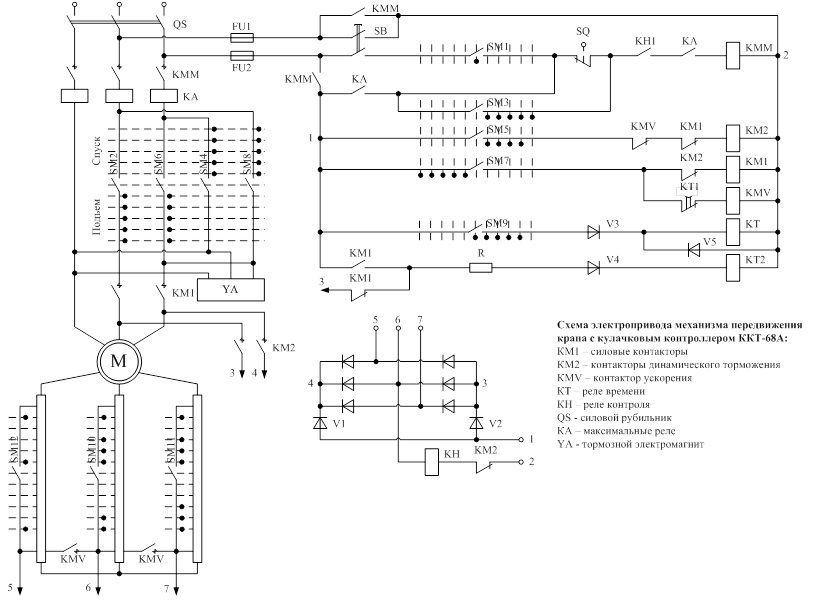
Рис. 7.1 Схема электропривода механизма передвижения крана с кулачковым контроллером ККТ-68А.
Схема электропривода с силовым кулачковым контроллером ККТ-68А применяется для возбуждаемых электродвигателей.
В схеме контакты кулачкового контроллера SM1 – SM12 обеспечивают реверс двигателя, регулирование сопротивлений, управление релейно-контакторной аппаратурой, вынесенной на панель управления и аппаратами защиты на защитной панели.
В схеме используется выпрямительный блок, подключаемый к контактам 5–7, механически сблокированные контакторы силовой КМ1 и динамического торможения КМ2, контактор ускорения KMV с реле времени КТ, реле контроля КН и КТ2, а так же диоды, необходимые для подпитки двигателя постоянным током в целях обеспечения начального возбуждения и питания реле. Защитная панель включает в себя линейный контактор КММ, силовой рубильник QS, блок максимальных реле КА и предохранителей цепи управления FU1, FU2.
Конечная защита осуществляется выключателем SQ.
При включении силового рубильника QS и нажатия кнопки SB на катушку контактора КММ подается питание. При этом проверяются следующие условия: нейтральное положение контроллера и состояние конечного выключателя SQ. Данные условия исключают самозапуск двигателя. При выполнении необходимых условий контактор КММ ставится на самопитание.
Если в процессе работы сработает конечный выключатель, то контактор КММ обесточится и с электродвигателя снимется питание, при этом происходит торможение механическим тормозами.
Включение, отключение и изменение направления вращения осуществляется с помощью силовых контактов контроллера. Переключение сопротивлений в цепи ротора (необходимо для пуска двигателя и регулирования скорости) так же производится с помощью контактов контроллера.
При подаче напряжения на статор двигателя одновременно включается катушка тормоза, при этом освобождается тормозной шкив.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.