Table 4.9 Управляющие сигналы, вычисляемые заранее в течении этапа ID для каждого из 10 выполняющихся состояний. Сигналы в первой таблице типа x, то есть, они управляют только этапом EX.
|
EX |
ALUDdoe |
SHDdoe |
linkDdoe |
add |
test |
Rtype |
|||||
|
M |
|||||||||||
|
WB |
|||||||||||
|
shift |
1 |
1 |
|||||||||
|
shiftl |
1 |
1 |
|||||||||
|
alu |
1 |
1 |
|||||||||
|
aluI |
1 |
||||||||||
|
test |
1 |
1 |
1 |
||||||||
|
testI |
1 |
1 |
|||||||||
|
addrL |
1 |
1 |
|||||||||
|
addrS |
1 |
1 |
|||||||||
|
savePC |
1 |
||||||||||
|
noEX |
|||||||||||
|
EX |
MARce |
bmuxsel |
MDRwce amuxsel shift4s |
Cad3ce |
|||||||
|
M |
Dmw |
Cad4ce Cce |
Dmr MDRrce |
||||||||
|
WB |
GPRw |
shift41 |
|||||||||
|
Type |
x |
x |
y |
z |
z |
||||||
|
shift |
1 |
1 |
|||||||||
|
shiftl |
1 |
||||||||||
|
alu |
1 |
1 |
|||||||||
|
alul |
1 |
||||||||||
|
test |
1 |
1 |
|||||||||
|
testl |
1 |
1 |
|||||||||
|
addrL |
1 |
1 |
1 |
||||||||
|
addrS |
1 |
1 |
|||||||||
|
savePC |
1 |
1 |
|||||||||
|
noEX |
|||||||||||
|
|
|
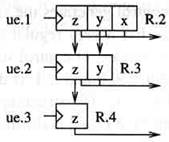
Рисунок 4.9 Буферизация вычисляемых заранее управляющих сигналов |
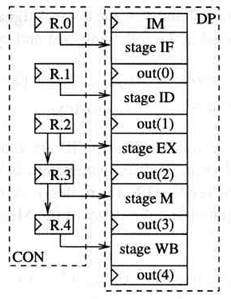
Рисунок 4.10 Структура путей данных DP и вычисляемого заранее управления CON машины DLXσ
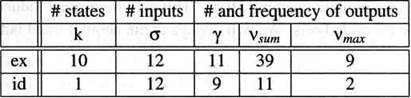
Таблица 4.10 Параметры двух управляющих автоматов; один вычисляет заранее сигналы Мура (ex) а другой генерирует сигналы Mealy (id).
|
Коэф. объединения по входу состояний |
# и длина одночленов |
||||
|
fansum |
fanmax: |
#M |
lsum |
lmax |
|
|
ex |
15 |
3 |
15 |
104 |
11 |
|
id |
- |
- |
5 |
22 |
10 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.