![]()
Так как этапы 0 являются для обеих машин одинаковым, мы имеем
![]()
для всех внутренних сигналов Sэтапа 0 и, следовательно, требование 1. В частности, в обеих машинах IM(0) синхронизируется с регистром команд в конце цикла T= T ' = 0. Следовательно, требование 2 следует из
![]()
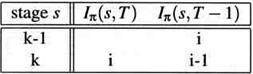
Таблица 4.12 Иллюстрация функции планирования Iπдля этапов k — 1 и k.
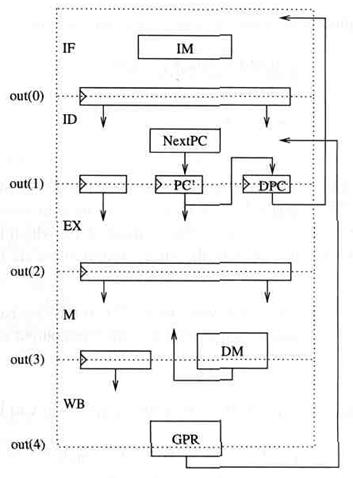
В шаге индукции мы заключаем от Т — 1 до T. Таким образом, мы должны показать требование 1 для сигналов S в цикле Tи мы требование 2 для регистров Rв цикле T + 1. Согласно рисунку 4.14, который иллюстрирует поток данных между этапами конструкции DLXσ , есть следующие четыре случая:
1. k = 2 (выполнение) или k = 4 (обратная запись).Это простейший случай. На рисунках 4.3 и 4.14 все ребра в этап kисходят из выходных регистров
R € out(k-1)
этапа k — 1. Из функции планирования можно заключить, что
Iπ(k-1,T-1) = Iπ(k,T) = Iσ(k,T ') = i.
Это показано в таблице 4.12. Пусть R - входной регистр этапа k, который является видимым или который был обновлен в конце цикла T — 1. Используя лемму 4.3 с t = 1 мы заключаем
rtп = Riпо индукционной гипотезе
= RT 'aпо лемме 4.3.
Следовательно, за исключением невидимых входных регистров R, которые не обновлялись после цикла T — 1, этап kмашины DLXπимеем в цикле Tте же самые входы, что и этап kмашины DLXa в цикле T'. Этап kодинаков в обеих машинах (это основа конструкции подготовленной машины !). По лемме 4.4 набор выходных регистров R' этапа k, которые обновляются после такта Tили T' соответственно, одинаков для обеих машин, и входные сигналы Sэтих регистров имеют одинаковые значения:
![]()
Из этого следует, что в конце этих циклов Tи T ' в R' синхронизируются одинаковые значения:
![]()
= r'iпо лемме 4.3.
|
|
Рисунок 4.14 Поток данных между конвейерными этапами конструкции DLXσ
2. k = 3 (память). Входы этого этапа включают регистры из out(2) и память DM, которая принадлежит out(3). Для входных регистров R€ out (2) заключение такое же, что и выше
RTπ = Ri = RT '.
Для i > 0 заключаем из функции управления (таблица 4.12)
Iπ(3, T-1) = i-1.
Мы имеем M![]() out(3), т.е., каждая ячейка
памяти является выходным регистром этапа 3. Используя лемму 4.3 при t= k= 3 и индукционную
гипотезу, мы можем заключить
out(3), т.е., каждая ячейка
памяти является выходным регистром этапа 3. Используя лемму 4.3 при t= k= 3 и индукционную
гипотезу, мы можем заключить
![]()
Для i = 0, функция планирования подразумевает
Iπ(3,T) = i <-> T = 3.
Таблица 4.13 Иллюстрация функции планирования Iπдля этапов 0 и 1.
|
этап s |
IП(s,T) |
Iя(s, T-1) |
|
0 |
i |
|
|
1 |
i-1 |
i-2 |
|
|
|
В конструкции DLXπ , память данных обновляется только если |
Согласно таблице 4.11, ячейки памяти Mне обновляются в течении циклов t€ {1,2}, потому что full[3]tπ = 0. Так как конструкция DLXπстартует с содержимым M1π = M-1, из этого следует
![]()
В конструкции DLXσ обновление памяти данных DM разрешается флагом full[3]. Таким образом, DM могла бы быть обновлена в течении сброса, но тогда обновление является отключенным пока I0 не достиг этапа 3, при с full[3]tσ = 0 для t€ {0,1,2}. Поэтому
![]()
Теперь аргумент полностью как в первом случае.
3. k= 0 (выборка). Здесь мы должны доказать, что задержанный PC может быть отвергнут. В конвейерной конструкции PC' является входным регистром только этапа IF, тогда как в последовательной конструкции входным регистром является DPC. Оба регистра – выходные этапа s = 1.
Для i > 2 заключаем из функции управления (таблица 4.13)
Iπ(1, T- l) = Iπ(0,T-1) - 1 = i - 2. Индукционная гипотеза подразумевает (для T > 1)
PCπ' T = PC'i-2 .
Для i= 1 (и T = 1) мы имеем конструкцию
PC'-1 = 4 = PC' π1.
Используя лемму 4.3 при t = 1, мы заключаем для T > 1
PC'ПT = PC'i-2 = DPCi-1по конструкции
= DPCTa' по лемме 4.3.
Теперь аргумент полностью как в первом случае.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.