





















































4.3 Цифровые вольтметры 281
напряжение ![]() постоянно,
то n = TVi / 4RCVR , откуда следует, что RCVR = 2´10-5 В×с. Если выбрать VR = 5 В, то полный размах пилообразного напряжения станет равным 10 В, что легко реализовать. Практические значения для
R и С следующие: R = 4 кОм, С = 1 нФ. Если Т, R, С и VR выдержаны с относительной
погрешностью меньше, чем 10-4, то упомянутое вначале требование
по точности удовлетворяется. При Vi
=
10 В частота пилообразного напряжения составляет n / Т = 125 кГц. При уменьшении входного напряжения эта частота пропорционально уменьшается.
постоянно,
то n = TVi / 4RCVR , откуда следует, что RCVR = 2´10-5 В×с. Если выбрать VR = 5 В, то полный размах пилообразного напряжения станет равным 10 В, что легко реализовать. Практические значения для
R и С следующие: R = 4 кОм, С = 1 нФ. Если Т, R, С и VR выдержаны с относительной
погрешностью меньше, чем 10-4, то упомянутое вначале требование
по точности удовлетворяется. При Vi
=
10 В частота пилообразного напряжения составляет n / Т = 125 кГц. При уменьшении входного напряжения эта частота пропорционально уменьшается.
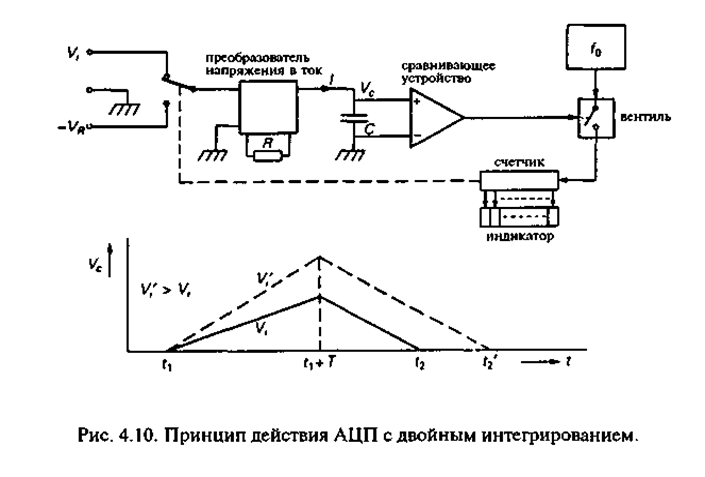
Число элементов схемы, требующих высокой точности, можно уменьшить интегрируя известное опорное напряжение непосредственно перед интегрированием входного сигнала или сразу после него. Отношение результатов этих двух измерений уже не будет зависеть от параметров элементов схемы (если только они не изменяются в процессе измерения). Точность такого измерения отношения напряжений в основном определяется точностью задания опорного напряжения и линейностью АЦП. Этот метод отношений применяется в так называемых АЦП с двойным интегрированием. На рис. 4.10 приведен пример АЦП с двойным интегрированием.
Во время первой половины измерения входное напряжение Vi интегрируется в течение фиксированного времени Т, например, с помощью преобразователя напряжения в ток (I = Vi / R) и конденсатора или интегратором Миллера (когда конденсатор С включен в качестве элемента отрицательной обратной связи, охватывающей операционный усилитель). Напряжение на конденсаторе Vc в конце интервала интегрирования Т равно:
Очевидно, что это
напряжение пропорционально Vi . В начале интервала интегрирования, то есть в момент t = t1 , счетчик устанавливается в нуль
Интегрирование продолжается до тех пор, пока счетчик не переполнится (при
требуемом разрешении 10n,
модуль счета равен 10n). Если ![]() — частота опорного
генератора, то интегрирование будет продолжаться в течение времени T = 10n /
— частота опорного
генератора, то интегрирование будет продолжаться в течение времени T = 10n /![]() . В
момент времени t1
+ T сигнал переполнения счетчика переключает вход АЦП на источник опорного
напряжения
. В
момент времени t1
+ T сигнал переполнения счетчика переключает вход АЦП на источник опорного
напряжения ![]() , полярность которого противоположна
полярности входного напряжения
, полярность которого противоположна
полярности входного напряжения ![]() .Это приведет к тому, что теперь напряжение на конденсаторе
будет уменьшаться с постоянной скоростью
.Это приведет к тому, что теперь напряжение на конденсаторе
будет уменьшаться с постоянной скоростью ![]() Сравнивающее устройство определяет момент времени t2 , когда напряжение
Сравнивающее устройство определяет момент времени t2 , когда напряжение ![]() становится равным нулю, и останавливает
измерение. Содержимое счетчика в этот момент времени равно:
становится равным нулю, и останавливает
измерение. Содержимое счетчика в этот момент времени равно:

Для постоянной
составляющей (среднего по времени) напряжения ![]() результат
счета выглядит так:
результат
счета выглядит так:
Следовательно, измерение
дает число, пропорциональное отношению напряжений ![]() и
и ![]() . Значение полной шкалы этого АЦП с двойным
интегрированием определяется величиной
. Значение полной шкалы этого АЦП с двойным
интегрированием определяется величиной ![]() .
Единственное требование, предъявляемое к элементам R, С и к частоте
.
Единственное требование, предъявляемое к элементам R, С и к частоте ![]() , состоит в необходимости иметь достаточную
кратковременную стабильность, чтобы не проявлялся никакой дрейф в течение
времени, необходимого для завершения двух циклов преобразования. Точность
элементов схемы больше не имеет значения. Этот метод также использует принцип
баланса зарядов, так как заряд, накапливаемый при первом интегрировании, равен
заряду, стекающему при втором интегрировании. Максимальное число измерений в
секунду мало, поскольку необходимо выполнить два интегрирования и, кроме того,
тратится время на переключение, начальную установку и т. д.
, состоит в необходимости иметь достаточную
кратковременную стабильность, чтобы не проявлялся никакой дрейф в течение
времени, необходимого для завершения двух циклов преобразования. Точность
элементов схемы больше не имеет значения. Этот метод также использует принцип
баланса зарядов, так как заряд, накапливаемый при первом интегрировании, равен
заряду, стекающему при втором интегрировании. Максимальное число измерений в
секунду мало, поскольку необходимо выполнить два интегрирования и, кроме того,
тратится время на переключение, начальную установку и т. д.
Этот недостаток устраняется применением принципа двух систем. Компенсирующие АЦП быстрее и точнее, но чувствительны к помехам. С другой стороны, интегрирующие АЦП нечувствительны к помехам, но медленны. Принцип двух систем, объединяющий лучшие характеристики компенсационных и интегрирующих АЦП, состоит в следующем. Для грубой компенсации входного напряжения применяется ЦАП. В остающемся разностном напряжении содержатся все помехи. Разностное напряжение измеряется с помощью интегрирующего АЦП. Если интегрирующий АЦП имеет относительную погрешность e , в результате
4.4 Осциллографы 283
компенсации остается d-я часть, а относительная погрешность ЦАП равна g, то полная погрешность составит величину g + ed.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.