Для
входного воздействия в виде аддитивной смеси параболы (с ускорением ![]() )
и шума (с эквивалентной спектральной плотностью мощности
)
и шума (с эквивалентной спектральной плотностью мощности ![]() ) средний
квадрат ошибки системы, включающий в себя квадрат динамической составляющей
ошибки
) средний
квадрат ошибки системы, включающий в себя квадрат динамической составляющей
ошибки ![]() и дисперсию флюктуационной составляющей ошибки
и дисперсию флюктуационной составляющей ошибки ![]() ,
определяется выражением:
,
определяется выражением:
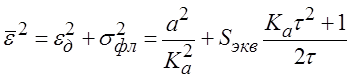 .
.
Минимизация среднего квадрата ошибки относительно параметров системы приводит к результату:
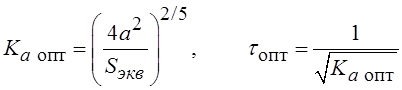 ,
,
где
![]() и
и ![]() - оптимальные параметры непрерывного измерителя, обеспечивающие
минимум среднего квадрата ошибки оценивания координат.
- оптимальные параметры непрерывного измерителя, обеспечивающие
минимум среднего квадрата ошибки оценивания координат.
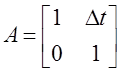
Простейший дискретный эквивалент (с формированием сигнала ошибки с помощью оценки экстраполяции) описывается в пространстве состояний уравнением:
![]() ,
,
где ![]() - вектор
оценок координаты и скорости ее изменения;
- вектор
оценок координаты и скорости ее изменения;
 ;
; ![]() ;
; ![]() -
вектор параметров, причем
-
вектор параметров, причем ![]() .
.
Точностные характеристики дискретной системы можно найти, используя как частотную, так и временную область анализа. В частотной области применяется метод z-преобразования. Для системы с 2-мя интеграторами при воздействии с постоянным ускорением дисперсия ошибки в режиме экстраполяции равна:
 (10)
(10)
Точностные характеристики дискретной и непрерывной систем практически одинаковы, если выполняется условие
 ,
,
где ![]() -
дисперсия шума в канале измерения.
-
дисперсия шума в канале измерения.
Сглаживающие свойства следящего измерителя характеризуются параметром:
 .
.
Если указанное условие не выполняется, то расчет оптимальных параметров дискретной системы следует уточнить. Такая задача и решается в рамках данной лабораторной работы.
4.2. Описание метода моделирования
Моделирование схемы следящего измерителя выполняется с помощью пакета «Simulink». Схема моделирования показана на рис.7 (файл для моделирования: «Lab_4_Sl2.mdl»). Динамика изменения координаты моделируется с помощью элемента «Constant», задающего ускорение, и двух интеграторов. К значению координаты добавляется случайная погрешность измерений (элемент «Random Number»). Модель следящего измерителя соответствует приведенному ранее векторному разностному уравнению.
Ошибка экстраполяции следящего измерителя отображается на экране осциллографа «Scope 1» и отправляется в файл (элемент «To File») для последующей обработки в среде «MatLab».
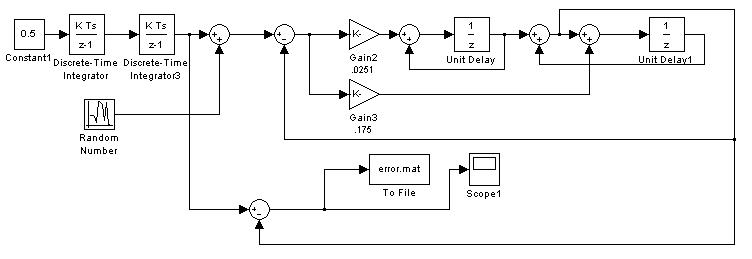
Рис.7
Параметры моделирования, как и ранее, устанавливаются в разделе меню «Simulation/Configuration parameters» (Type: «Fixed step», Solver: «discrete», время моделирования желательно выбрать большим для получения достоверных статистических результатов моделирования: параметр «Simulation time/Stop time» задается равным 100000). Для начала моделирования дается команда «Simulation/Start». Результаты моделирования наблюдаются в виде осциллограммы, а также передаются в среду «MatLab» для последующей обработки. С этой целью формируется файл с ошибками фильтра err_C. Файл содержит матрицу, состоящую из отсчетов времени t и значений ошибки er. Для выделения строки ошибок er и определения среднего квадрата ошибки используются операторы: er=[0 1]*err_C; mean(er)*mean(er)+var(er). Дисперсия флюктуационной составляющей ошибки определяется оператором var(er). Следует заметить, что статистическая обработка результатов эксперимента также возможна непосредственно при моделировании. Для этой цели подходят элементы: «Math Function» - операция возведения ошибки фильтра в квадрат, «Discrete-Time Integrator» - суммирование квадратов ошибки, «Gain» - деление на число шагов эксперимента, «Display» - регистрация результата. Однако такой способ обработки результатов эксперимента существенно увеличивает время моделирования и, по этой причине, не рекомендуется его использовать в случае ограниченных временных ресурсов.
4.3. Задание по работе
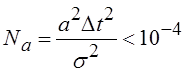
1. В среде «MatLab» выполнить расчет оптимальных параметров
непрерывной
системы и, соответствующих им, параметров дискретного эквивалента. Определить
значение ![]() . Исходные данные выбрать в соответствии с
Табл.3 (
. Исходные данные выбрать в соответствии с
Табл.3 (![]() , первое значение
, первое значение ![]() ).
).
2. Установить параметры схемы моделирования в соответствии с резуль-
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.