Разностным уравнениям (5)-(7) соответствует схема,
представленная на рис.5. Цифровой дальномер содержит дискретный интегратор,
образуемый контуром из элемента задержки ![]() и цепи
обратной связи с сумматором. Для моделирования отсчета дальности
и цепи
обратной связи с сумматором. Для моделирования отсчета дальности ![]() также используется
дискретный интегратор, на вход которого поступает значение приращения дальности
также используется
дискретный интегратор, на вход которого поступает значение приращения дальности
![]() . Погрешность измерения моделируется случайной величиной
. Погрешность измерения моделируется случайной величиной ![]() .
.
Формирующий фильтр формально содержит 2 интегратора
(для формирования постоянного приращения дальности ![]() также нужен
интегратор), поэтому дисперсионное уравнение дальномера имеет 2-й порядок и
описывает поведение корреляционной матрицы вида:
также нужен
интегратор), поэтому дисперсионное уравнение дальномера имеет 2-й порядок и
описывает поведение корреляционной матрицы вида:  Нас
интересует элемент
Нас
интересует элемент ![]() , характеризующий ошибки дальномера. Решение
дисперсионного уравнения дальномера с одним интегратором и произвольным коэффициентом
усиления
, характеризующий ошибки дальномера. Решение
дисперсионного уравнения дальномера с одним интегратором и произвольным коэффициентом
усиления ![]() для
выбранной модели воздействия приводит к результату:
для
выбранной модели воздействия приводит к результату:
 ,
(8)
,
(8)
где
![]() - дисперсия ошибки дальномера в режиме
экстраполяции.
- дисперсия ошибки дальномера в режиме
экстраполяции.
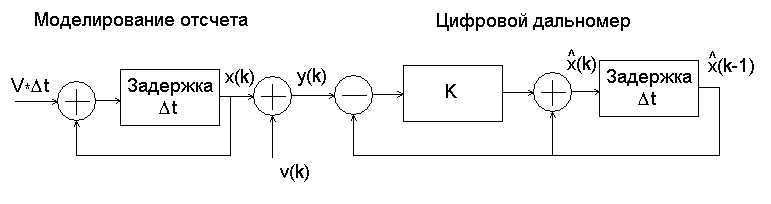
Рис.5
Минимизация ![]() относительно
относительно ![]() требует
решения уравнения:
требует
решения уравнения:
![]() .
.
Это решение определяется выражением:

 , (9)
, (9)
где
 ,
, ![]() – скорость изменения дальности,
– скорость изменения дальности, ![]() –
дисперсия шума
–
дисперсия шума ![]() в измерениях дальности.
в измерениях дальности.
В случае выполнения условия ![]() ,
точностные характеристики дискретной (цифровой) и непрерывной систем
практически одинаковы и можно использовать более простой способ вычисления
,
точностные характеристики дискретной (цифровой) и непрерывной систем
практически одинаковы и можно использовать более простой способ вычисления ![]() :
:
![]() .
.
3.2. Описание метода моделирования
Моделирование цифрового дальномера выполняется с
помощью пакета «Simulink». Схема моделирования показана на рис.6 (файл для
моделирования: «Lab_3_Sl1.mdl»). Приращение дальности ![]() в этой схеме формируется блоком «Constant».
Таким образом, дальность изменяется во времени с постоянной скоростью.
Погрешность измерения моделируется блоком «Random
Number».
в этой схеме формируется блоком «Constant».
Таким образом, дальность изменяется во времени с постоянной скоростью.
Погрешность измерения моделируется блоком «Random
Number».
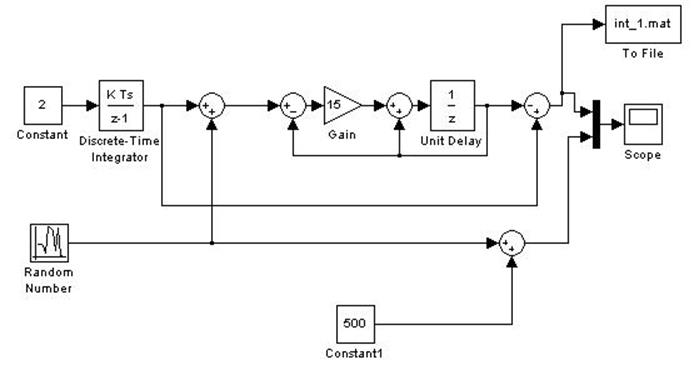
Рис.6
Отсчет дальности
суммируется вместе с погрешностью измерений и поступает на вход вычитающего
устройства дальномера. Коэффициент усиления ![]() воспроизводится
блоком «Gain», цепь задержки – «Unit Delay».
Разность между точным значением дальности
воспроизводится
блоком «Gain», цепь задержки – «Unit Delay».
Разность между точным значением дальности ![]() и оценкой дальности
и оценкой дальности ![]() на выходе
дальномера (т.е. ошибка экстраполяции) поступает на запись в файл (элемент «To File») и в осциллограф «Scope» (для
визуального разделения процессов с помощью осциллографа «Scope»
к погрешности измерений добавляется постоянная составляющая с выхода блока «Constant1»;
величину этой составляющей следует выбрать, исходя из удобства наблюдения 2-х
случайных процессов).
на выходе
дальномера (т.е. ошибка экстраполяции) поступает на запись в файл (элемент «To File») и в осциллограф «Scope» (для
визуального разделения процессов с помощью осциллографа «Scope»
к погрешности измерений добавляется постоянная составляющая с выхода блока «Constant1»;
величину этой составляющей следует выбрать, исходя из удобства наблюдения 2-х
случайных процессов).
Параметры моделирования, как и ранее, устанавливаются в разделе меню «Simulation/Configuration parameters» (Type: «Fixed step», Solver: «discrete», параметр «Simulation time/Stop time» задается равным 5000). Для начала моделирования дается команда «Simulation/Start».
Результаты моделирования наблюдаются в виде осциллограммы, а также передаются в среду «MatLab» для последующей обработки. С этой целью формируется файл с ошибками фильтра er_1 (идентификатор файла может быть другим). Файл содержит матрицу, в которой первая строка состоит из отсчетов времени t, а вторая содержит ошибки er. Для выделения строки ошибок er и определения среднего значения mean(er), дисперсии var(er) и суммарной ошибки mean(er)^2+var(er) используются операторы:
er=[0 1]*er_1; [mean(er) var(er) mean(er)^2+var(er)].
3.3. Задание по работе
1.
Выбрать значение приращения дальности ![]() и дисперсию
и дисперсию ![]() случайного шума
случайного шума ![]() в соответствии с данными Табл. 2 (два набора исходных
данных соответствуют ситуациям, когда условие
в соответствии с данными Табл. 2 (два набора исходных
данных соответствуют ситуациям, когда условие ![]() выполняется
и не выполняется). В среде MatLab построить
зависимость
выполняется
и не выполняется). В среде MatLab построить
зависимость ![]() от
от ![]() (вариант программы
приведен ниже).
(вариант программы
приведен ниже).
%Оптимизация параметров дальномера с 1 интегратором
clear;
Disp=36000;
DV=40;
for i=1:10;
K=i/10;
p=Disp*K/(2-K)+DV*DV/K/K; % Выражение (8)
x(i)=K;
p11(i)=p;
end;
plot(x,p11)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.