Первый ноль
косинусоиды соответствует временному сдвигу ![]() В случае
резкого изменения высоты полета (например, при посадке) синоптическая
погрешность может резко измениться за несколько минут. Поэтому при фильтрации
постоянную времени выбирают около 100 с, а синоптическую погрешность на таком
временном интервале полагают постоянной величиной. Положительные качества
баровысотомера: автономность и высокая надежность; недостаток: зависимость
погрешности измерений от метеоусловий.
В случае
резкого изменения высоты полета (например, при посадке) синоптическая
погрешность может резко измениться за несколько минут. Поэтому при фильтрации
постоянную времени выбирают около 100 с, а синоптическую погрешность на таком
временном интервале полагают постоянной величиной. Положительные качества
баровысотомера: автономность и высокая надежность; недостаток: зависимость
погрешности измерений от метеоусловий.
Радиовысотомер измеряет высоту ЛА относительно подстилающей поверхности (моря, равнины, гор, и т.д.). Погрешность радиовысотомера при отсутствии крена ЛА обычно моделируется белым шумом. Отметим, что в качестве альтернативы радиовысотомеру может применяться спутниковая радионавигационная система, оценивающая, в том числе, и высоту ЛА. Положительные качества радиовысотомера: высокая точность (при отсутствии маневра ЛА); недостаток: низкая помехоустойчивость.
Комплексирование датчиков высоты обеспечивает коррекцию баровысотомера. При этом предполагается, что ЛА выполняет полет над плоским участком местности с ограниченным углом крена (с этой целью применяются база данных о подстилающей поверхности и датчик крена).
При объединении измерений датчиков осуществляется пересчет высот либо к абсолютной высоте (относительно уровня моря):
![]() где
где ![]() -
измерение радиовысотомера относительно подстилающей поверхности;
-
измерение радиовысотомера относительно подстилающей поверхности; ![]() -
высота подстилающей поверхности относительно уровня моря, либо к относительной
высоте (относительно уровня взлетно-посадочной высоты):
-
высота подстилающей поверхности относительно уровня моря, либо к относительной
высоте (относительно уровня взлетно-посадочной высоты): ![]() .
Рассмотрим 1-й вариант (рис.8).
.
Рассмотрим 1-й вариант (рис.8).
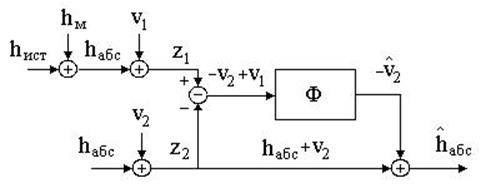
Рис.8
Из измерений радиовысотомера
(![]() ) и баровысотомера (
) и баровысотомера (![]() )
формируется разность, которая содержит ошибку радиовысотомера (белый шум
)
формируется разность, которая содержит ошибку радиовысотомера (белый шум ![]() )
и ошибку баровысотомера (смещение со знаком минус
)
и ошибку баровысотомера (смещение со знаком минус ![]() ). С помощью
фильтра Ф оценивается отрицательное смещение, которое используется для
компенсации ошибки баровысотомера. В качестве фильтра используется дискретная
следящая система 1-го порядка с постоянной времени 100 с.
). С помощью
фильтра Ф оценивается отрицательное смещение, которое используется для
компенсации ошибки баровысотомера. В качестве фильтра используется дискретная
следящая система 1-го порядка с постоянной времени 100 с.
5.2. Описание метода моделирования
Моделирование алгоритма комплексирования выполняется с помощью пакета «Simulink». Схема моделирования показана на рис.9 (файл для моделирования: «Lab_5_Sk.mdl»). Высота полета ЛА полагается постоянной и моделируется с помощью элемента «Constant». К значению высоты добавляется случайная погрешность измерений радиовысотомера (элемент «Random Number»).
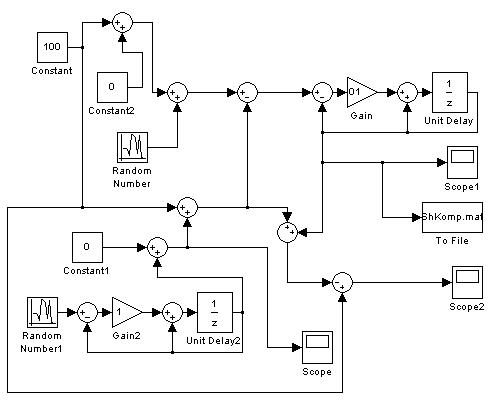
Рис.9
При наличии крена ЛА в измерениях радиовысотомера появляется смещение, которое моделируется с помощью элемента «Constant 2». Синоптическая погрешность баровысотомера полагается константой и моделируется с помощью элемента «Constant 1». Предусмотрена возможность добавления к этой константе экспоненциально-коррелированной случайной компоненты. Ошибка баровысотомера контролируется с помощью осциллографа «Scope». Разность измерений радиовысотомера и баровысотомера поступает на вход дискретного следящего измерителя 1-го порядка с постоянной времени 100 с (коэффициент усиления 0,01). Выход следящего измерителя контролируется с помощью осциллографа «Scope 1» и отправляется в файл (элемент «To File») для последующей обработки в среде «MatLab». После компенсации ошибки баровысотомера формируется сигнал ошибки схемы компенсации, который отображается на экране осциллографа «Scope 2».
Параметры моделирования, как и ранее, устанавливаются в разделе меню «Simulation/Configuration parameters» (Type: «Fixed step», Solver: «discrete», время моделирования желательно выбрать большим для получения достоверных статистических результатов моделирования: параметр «Simulation time/Stop time» задается равным 100000). Для начала моделирования дается команда «Simulation/Start». Результаты моделирования наблюдаются в виде осциллограммы, а также передаются в среду «MatLab» для последующей обработки.
5.3. Задание по работе
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.