6.1. Основные теоретические сведения
Комплексирование радиотехнических и автономных средств навигации позволяет повысить точность и надежность оценивания координат. Примером комплексной системы является система оценивания координат самолета, состоящая из радиотехнической системы ближней навигации и автономных датчиков воздушной скорости и угла курса.
В лабораторной работе исследуется дальномерный канал такой системы, в котором данные о дальности самолета до маяка объединяются с результатами измерения скорости полета, получаемыми от датчика воздушной скорости.
Отдельные
измерители комплексной системы работают в разных системах координат и требуются
дополнительные преобразования координат. Особенности преобразования координат в
лабораторной работе не рассматриваются. Предполагается, что в дальномер из
вычислителя поступает значение скорости изменения расстояния до маяка ![]() ,
вычисленное по данным датчика воздушной скорости и курсовой системы.
,
вычисленное по данным датчика воздушной скорости и курсовой системы.
Реальная
скорость перемещения самолета относительно маяка связана с ![]() соотношением:
соотношением:
![]() ,
,
где ![]() - ошибка
измерения, обусловленная влиянием ветра.
- ошибка
измерения, обусловленная влиянием ветра.
Величина
![]() изменяется с течением времени по случайному закону с интервалом
корреляции, измеряемым минутами, и, в первом приближении, может моделироваться
в виде экспоненциально-коррелированного случайного процесса.
изменяется с течением времени по случайному закону с интервалом
корреляции, измеряемым минутами, и, в первом приближении, может моделироваться
в виде экспоненциально-коррелированного случайного процесса.
В
основу объединения радиотехнических и автономных данных положен известный
принцип инвариантности. Поскольку датчики неоднородные, применяется схема
следящего контура с двумя интеграторами (рис.10). Благодаря наличию двух
интеграторов в системе компенсируется влияние ветра, так как в первом
интеграторе вырабатывается поправка на скорость ветра ![]() (оценка
(оценка
![]() , но с противоположным знаком) и на второй интегратор поступает сигнал,
соответствующий уточненному значению скорости полета самолета (
, но с противоположным знаком) и на второй интегратор поступает сигнал,
соответствующий уточненному значению скорости полета самолета (![]() плюс поправка
плюс поправка ![]() ).
).
Оценим
эффективность комплексирования. Если дальномер работает без комплексирования,
то при действии в канале измерения флюктуационной помехи с эквивалентной
спектральной плотностью мощности ![]() и
постоянном ускорении объекта (самолета)
и
постоянном ускорении объекта (самолета) ![]() имеют
место динамическая и флюктуационная составляющие ошибки слежения, рассмотренные
в работе №3.
имеют
место динамическая и флюктуационная составляющие ошибки слежения, рассмотренные
в работе №3.
При
наличии комплексирования ускорение самолета не вызывает появления динамической
ошибки (действует принцип инвариантности). Динамическая ошибка при этом может
возникнуть только из-за ускорения ветра ![]() , которое
обычно существенно меньше ускорения самолета:
, которое
обычно существенно меньше ускорения самолета: ![]() .
.
Замена ускорения самолета на ускорение ветра при расчете оптимальных коэффициентов следящей системы приводит к уменьшению шумовой полосы и, соответственно, к увеличению помехоустойчивости системы (см. результаты выполнения работы №4). При этом уменьшается не только дисперсия ошибки оценивания дальности, но и дисперсия ошибки оценивания скорости. Последнее обстоятельство существенно улучшает надежность работы системы при пропаданиях радиосигнала, возникающих из-за больших углов крена самолета и других причин. Следящий дальномер с двумя интеграторами может формировать оценку дальности при пропадании сигнала путем интегрирования данных о скорости, поступающих с первого интегратора (интегратора скорости) или автономных датчиков. Ошибка оценивания дальности при этом зависит от времени интегрирования и ошибки оценивания скорости. Если комплексирование отсутствует, то оценка скорости вырабатывается интегратором скорости с большой флюктуационной ошибкой. Кроме того, маневрирование самолета при отсутствии сигнала может привести к дополнительным ошибкам (в процессе маневрирования изменяется скорость).
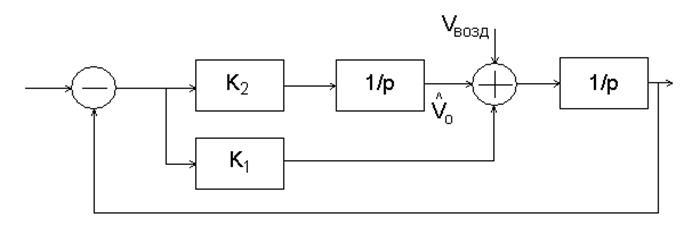
Рис.10
В комплексной системе в интеграторе скорости с высокой точностью вырабатывается поправка к значению скорости, поступающему от автономного датчика. Кроме того, изменение скорости в процессе маневрирования самолета не вызывает дополнительных ошибок, так как скорость оценивается с помощью датчика воздушной скорости.
Возможность точного оценивания координат при кратковременных пропаданиях радиосигнала является одним из важнейших качеств комплексной системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.