6.2. Описание метода моделирования
Моделирование схемы комплексирования выполняется с помощью пакета «Simulink». Схема моделирования показана на рис.11 (файл для моделирования: «Lab_6_Compl.mdl»). На схеме датчик случайных чисел «Random Number 1» используется для формирования экспоненциально-коррелированного процесса, соответствующего ошибке датчика воздушной скорости, создаваемой ветром. Динамика изменения дальности моделируется в упрощенной форме: скорость полета моделируется константой (элемент «Constant 1»). Эта величина поступает на вход интегратора, формирующего значение дальности. К значению дальности добавляется случайная погрешность измерений (элемент «Random Number»).
Особенность следящего дальномера заключается в том, что к выходному значению интегратора скорости (элемент «Unit Delay 2») добавляется отсчет автономного датчика воздушной скорости. Выходные сигналы интегратора скорости и датчика скорости поступают также на двухлучевой осциллограф «Scope». Экстраполированная оценка дальности от следующего сумматора (элемент «Sum 4») сравнивается с истинным значением дальности в вычитающем элементе «Sum 7». Ошибка измерения подается на осциллограф «Scope 1» и в файл (элемент «To File»). Для отключения автономного датчика предусмотрен элемент «Gain 1». Эффект пропадания радиосигнала моделируется элементом «Product», управляемым сигналом сравнения текущего времени моделирования (элемент «Clock») и заданного порога (элемент «Constant»). Сигнал сравнения вырабатывает элемент «Relational Operator».
Параметры моделирования, как и ранее, устанавливаются в разделе меню «Simulation/Configuration parameters» (Type: «Fixed step», Solver: «discrete», параметр «Simulation time/Stop time» задается равным 50000). Режим пропаданий радиосигнала должен быть выключен (порог, задаваемый элементом «Constant», должен превышать время моделирования). Для начала моделирования дается команда «Simulation/Start».
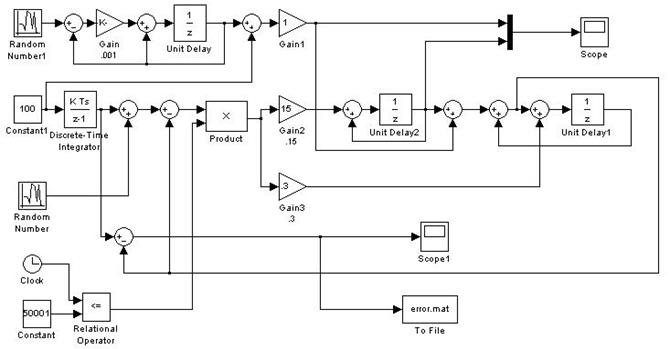
Рис.11
Результаты моделирования наблюдаются в виде осциллограмм, а также передаются в среду «MatLab» для последующей обработки. С этой целью формируется файл с ошибками фильтра err_C. Файл содержит матрицу. Для выделения из матрицы строки ошибок er и определения среднего и дисперсии используются операторы: er=[0 1]*err_C; [mean(er) var(er)].
Заметим, что значение var(er) учитывает все случайные компоненты ошибки измерителя (флюктуационную, обусловленную шумом в канале измерения, и динамическую, обусловленную коррелированной ошибкой автономного датчика).
6.3. Задание по работе
1. Убедиться, что коэффициент усиления элемента «Gain» равен 0,001 (постоянная времени 1000 с). Изменяя дисперсию в датчике случайных чисел «Random Number 1» от 105 до 106 (5 точек), просмотреть осциллограммы, отображаемые двухлучевым осциллографом «Scope». Сравнить, зарисовать и объяснить процессы.
2. Отключить данные автономного датчика, положив коэффициент усиления элемента «Gain 1» равным 0. Зарисовать и объяснить процесс, отображаемый двухлучевым осциллографом «Scope».
3. Результаты моделирования по пп.1 и 2 передать в среду «MatLab», вычислить среднее и дисперсию ошибки дальномера и убедиться в том, что среднее значение ошибки дальномера близко к нулю независимо от работы автономного датчика.
4. Для комплексного дальномера построить экспериментальную зависимость дисперсии ошибки измерителя от дисперсии датчика случайных чисел «Random Number 1».
5. Уменьшить значение интервала корреляции ошибки автономного датчика с 1000 с до 100 с (5 точек; изменять коэффициент усиления элемента «Gain») и оценить его влияние на дисперсию ошибки измерителя (построить экспериментальную зависимость).
6. Включить режим пропадания радиосигнала. Зарисовать и объяснить процессы, отображаемые осциллографами.
6.4.Содержание отчета
1. Структурная схема комплексной системы и схема моделирования.
2. Осциллограммы процессов в комплексной системе и пояснения к ним.
3. Экспериментальная зависимость дисперсии ошибки измерителя
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.