от дисперсии датчика случайных чисел.
4. Экспериментальная зависимость дисперсии ошибки измерителя от интервала корреляции ошибки автономного датчика.
5. Пояснения к п.6.
6. Формулировка задач проведенного исследования и выводы по полу-
ченным результатам.
6.5. Контрольные вопросы
1. Сущность принципа инвариантности и основные схемы комплексиро-
вания, реализующие этот принцип?
2. Назначение автономных датчиков воздушной скорости и угла курса?
3. Какими преимуществами обладает комплексный дальномер?
4. Оценку какой величины строит первый интегратор следящей системы
при комплексировании и без него?
5. Почему дисперсия ошибки дальномера без комплексирования оказыва-
ется больше дисперсии ошибки дальномера с комплексированием при идеальном автономном датчике?
Практическое занятие №7
Моделирование движения объекта на плоскости
Цель работы – исследование метода моделирования движения объекта на плоскости в непрерывном и дискретном времени. Подобное моделирование широко используется при оценке точностных характеристик радиолокационных и радионавигационных систем радиоуправления.
7.1.Описание метода моделирования
При использовании непрерывного времени изменение
положения объекта на плоскости ![]() (рис.12)
можно описать с помощью системы дифференциальных уравнений. Используется
модель, в которой координаты объекта
(рис.12)
можно описать с помощью системы дифференциальных уравнений. Используется
модель, в которой координаты объекта ![]() и
и ![]() изменяются
во времени с заданными скоростями и случайными ускорениями.
изменяются
во времени с заданными скоростями и случайными ускорениями.
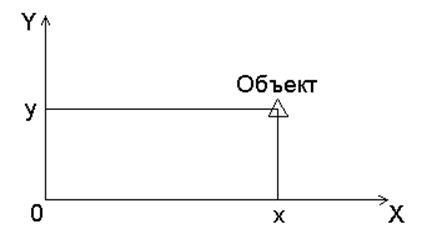
Рис.12
Если проекции ускорения объекта на оси ![]() и
и
![]() являются независимыми случайными процессами типа «белый» шум, получим
систему уравнений
являются независимыми случайными процессами типа «белый» шум, получим
систему уравнений
![]()
![]() ,
,
![]()
![]() ,
,
где
![]() и
и ![]() – проекции вектора скорости объекта на оси
– проекции вектора скорости объекта на оси ![]() и
и
![]() ;
; ![]() и
и ![]() – «белые»
шумы со спектральной плотностью
– «белые»
шумы со спектральной плотностью ![]() .
.
Система дифференциальных уравнений дополняется
начальными условиями при ![]() :
: ![]() ,
, ![]() ,
, ![]() и
и
![]() . Значения
. Значения ![]() и
и ![]() определяют
начальное положение, а
определяют
начальное положение, а ![]() и
и ![]() –
направление и величину вектора скорости объекта.
–
направление и величину вектора скорости объекта.
Моделирование систем радиоуправления и,
соответственно, траекторий движения объектов обычно выполняется на цифровых
ЭВМ. Для этого задача моделирования должна быть описана в дискретном времени.
Система дифференциальных уравнений, с учетом того, что шумы ![]() и
и
![]() записываются в виде вектора
записываются в виде вектора ![]() , а наблюдаемыми
являются процессы
, а наблюдаемыми
являются процессы ![]() и
и ![]() , может быть
представлена в пространстве состояний уравнениями:
, может быть
представлена в пространстве состояний уравнениями:

![]()
Далее находится решение векторного дифференциального уравнения в виде:
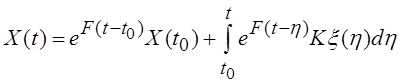
и
это решение рассматривается на интервале временной дискретизации ![]() В результате
получаем векторное разностное уравнение состояния эквивалентной дискретной
модели формирующего
фильтра
В результате
получаем векторное разностное уравнение состояния эквивалентной дискретной
модели формирующего
фильтра
![]()
Переходная матрица ![]() вычисляется
точным:
вычисляется
точным: ![]() или приближенным:
или приближенным: ![]() способом.
способом.
Дискретный
шум объекта ![]() полагается белым, имеет нулевое среднее и
корреляционную матрицу (
полагается белым, имеет нулевое среднее и
корреляционную матрицу (![]() - диагональная матрица спектральных плотностей
мощности шумов
- диагональная матрица спектральных плотностей
мощности шумов ![]() и
и ![]() ):
):

Уравнение измерений в дискретном времени сохраняет свою форму:
![]() ,
,
причем дискретный шум
измерений ![]() также полагается белым, имеет нулевое среднее и
корреляционную матрицу
также полагается белым, имеет нулевое среднее и
корреляционную матрицу
![]()
Моделирование движения объекта выполняется с помощью
пакета Simulink. Схема моделирования в непрерывном времени показана
на рис.13 (файл для моделирования: «Lab_5_Tr_Cont.mdl»).
Начальные значения проекций вектора скорости ![]() и
и ![]() устанавливаются
с помощью элементов «ConstantX» и «ConstantY», соответственно. Шумы
устанавливаются
с помощью элементов «ConstantX» и «ConstantY», соответственно. Шумы ![]() и
и ![]() формируются элементами «Band-Limited White Noise» и «Band-Limited White Noise 1». Координаты
объекта формируются элементами «IntegratorX»и «IntegratorY» . Для
получения траектории движения объекта на плоскости XOY
используется индикатор «XYGraph»,
графики изменения координат xиyможно
наблюдать на осциллографе «ScopeX,Y».
Для определения дальности объекта относительно начала координат пара величин х
и у преобразуется в комплексное число с помощью элемента «Real-ImagtoComplex» и затем выполняется вычисление модуля с помощью
элемента «ComplextoMagnitude-Angle». Для определения угловой координаты объекта
используются элементы «Trigonometric Function» (функция Atan2)
и «Fcn» (пересчет угловой координаты из радиан в градусы).
Полярные координаты объекта можно наблюдать на осциллографах «ScopeD» и «ScopeA».
формируются элементами «Band-Limited White Noise» и «Band-Limited White Noise 1». Координаты
объекта формируются элементами «IntegratorX»и «IntegratorY» . Для
получения траектории движения объекта на плоскости XOY
используется индикатор «XYGraph»,
графики изменения координат xиyможно
наблюдать на осциллографе «ScopeX,Y».
Для определения дальности объекта относительно начала координат пара величин х
и у преобразуется в комплексное число с помощью элемента «Real-ImagtoComplex» и затем выполняется вычисление модуля с помощью
элемента «ComplextoMagnitude-Angle». Для определения угловой координаты объекта
используются элементы «Trigonometric Function» (функция Atan2)
и «Fcn» (пересчет угловой координаты из радиан в градусы).
Полярные координаты объекта можно наблюдать на осциллографах «ScopeD» и «ScopeA».
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.