












































САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ФИЗИЧЕСКИЙ ФАКУЛЬТЕТ
НАПРАВЛЕНИЕ
«ПРИКЛАДНЫЕ МАТЕМАТИКА И ФИЗИКА»
Учебно-методическое пособие.
Автоматизированные измерения и моделирование свойств
линейных систем
Составили: доц. Павлейно М.А., ст. преп. Сафронова Ю.Ф.
Санкт – Петербург
2006 г.
Введение ......................................................................................... 3
Линейные системы ........................................................................ 3
Основные методы анализа линейных систем ............................. 5
Системы первого порядка ............................................................ 13
Системы второго порядка ............................................................ 20
Применение Matlab для моделирования линейных систем ....... 25
Выполнение экспериментальных измерений ............................. 35
Задание к работе ............................................................................ 51
Список литературы ....................................................................... 51
Целью данной работы является практическое освоение основных методов анализа линейных систем (фильтров) – временного и частотного. В первом случае задача определения сигнала на выходе фильтра решается во временной области, свойства фильтров описываются их импульсной или переходной характеристикой. Во втором случае задача решается с применением спектральных разложений. Для изучения основных особенностей применения указанных методов выбраны простейшие линейные системы – RC-фильтры первого и второго порядка. Более сложные случаи рассматриваются в работах «Резонансные явления», «Активные фильтры» и др.
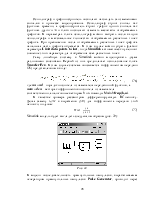
Работа выполняется в два этапа. На первом этапе выполняется компьютерное моделирование линейных систем. В качестве среды моделирования используется Matlab и его пакеты расширения SignalProcessingTooldox, Simulink, SimPowerSystem. С использованием этих программных средств строятся амплитудно-частотные, фазо-частотные, переходные и импульсные характеристики фильтров, рассчитывается прохождение через фильтры типовых сигналов.
На втором этапе работа фильтров исследуется экспериментально. Результаты компьютерных расчетов сравниваются с полученными экспериментальными данными. Измерения выполняются как с использованием аналоговых, так и цифровых приборов. В последнем случае используется возможность записи данных в файл и их дальнейшей обработки в Matlab.
Под линейными понимают такие системы, параметры которых не зависят от величины распространяющихся в них сигналов. Строго говоря, любая система является нелинейной, однако в случае распространения малых сигналов нелинейными эффектами, как правило, можно пренебречь. Так, например, сопротивление отрезка проводника зависит от его температуры, которая в свою очередь определяется не только температурой окружающей среды, но и величиной протекающего через него тока. Последнее обстоятельство приводит к тому, что данный объект является нелинейным. Однако если величина протекающего тока достаточно мала, то температура проводника определяется, в основном, температурой окружающей среды и его сопротивление практически не зависит от величины тока. В этих условиях нелинейные свойства проводника можно не учитывать.
Если размеры системы достаточно малы (по сравнению с длиной волны распространяющихся в ней сигналов), то можно не учитывать волновой характер протекающих в ней процессов, в частности излучение сигнала в окружающее пространство, и ввести понятие системы с сосредоточенными параметрами – сопротивлениями, конденсаторами и индуктивностями. В дальнейшем мы будем рассматривать только линейные системы с сосредоточенными параметрами.
Процессы, протекающие в линейных системах, описываются линейными дифференциальными уравнениями, которые получаются из системы уравнений Кирхгофа для контуров и узлов. Проиллюстрируем процесс составления дифференциальных уравнений на примере RC-цепочки, изображенной на рис.1.
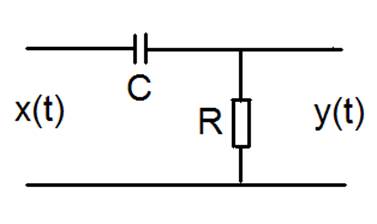
Рис. 1
Запишем уравнение Кирхгофа
![]()
или
Обозначив ![]() , и
продифференцировав обе части (2), получим искомое дифференциальное уравнение
, и
продифференцировав обе части (2), получим искомое дифференциальное уравнение
В общем случае для линейной системы с сосредоточенными параметрами дифференциальное уравнение имеет следующий вид:
![]()
Порядок дифференциального уравнения определяет порядок линейной системы. В частности, рассмотренная RC-цепочка является системой первого порядка. Заметим, что порядок дифференциального уравнения не может превышать число реактивных элементов в схеме.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.