При помощи электрических индуктивных датчиков можно измерять износ в процессе испытания без остановки машины. Схема измерения износа приведена на рис 6 Перемещение образца 4 по мере износа вызывает перемещение якоря 1, вследствие чего изменяются зазоры li и Ь, влияющие на величину коэффициента индукции электромагнитов 2, 3 в мостиковой схеме. Регистрация износа осуществляется самопишущими или стрелочными приборами. Конструкции индуктивных датчиков могут быть выполнены по рычажной и безрычажной схеме. Передаточное отношение у датчика с рычажной системой (рис. 7) больше единицы, а у безрычажного - равно единице Для измерения износа в несколько миллиметров может быть применен датчик с большим ходом, схема которого показана на рис. 8. При помощи его можно контролировать изменение линейных размеров до 10 мм. Характеристика его является линейной почти на всем диапазоне измерения.
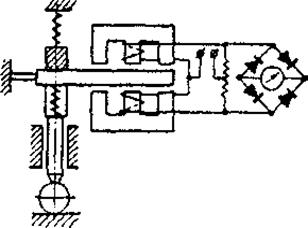
Рисунок 7. Схема рычажного индуктивного датчика
Рисунок 8. Схема индуктивного датчика с большим ходом: 1 - образец; 2 - якорь; 3 – индуктивные катушки.
Наиболее часто применяются дифференциальные датчики, в которых якорь расположен между двумя катушками. Наличие двух катушек увеличивает чувствительность датчика вдвое, так как при перемещении якоря индуктивность одной катушки убывает, а другой - возрастает на ту же величину. .
Индуктивный датчик включается в электросхему уравновешенного или неуравновешенного моста. Схему уравновешенного моста образуют две катушки датчика и два плеча реохорда, движком которого осуществляется нулевой баланс. Схема неуравновешенного моста образуется двумя катушками датчика и двумя обмотками дифференциального трансформатора. Напряжение разбаланса, снимаемое со вторичной обмотки трансформатора, усиливается, выпрямляется и подается на регистрирующий прибор. Шкала такого прибора обычно градуируется в линейных единицах.
При самобалансирующейся системе напряжение разбаланса после усиления подается на электродвигатель, перемещающий элемент, который осуществляет баланс системы. При этом возможна запись показаний на диаграмме. Как правило, индуктивные датчики питаются переменным током с частотой 50 Гц. Повышение частоты тока хотя и увеличивает чувствительность датчика, однако требует специального источника питания
Широкое распространение для измерений и записи износа, регистрируемого при помощи дифференциального индуктивного датчика, получил электрический самописец БВ-662. Основными частями прибора являются, индуктивный дифференциальный датчик, вибрационный преобразователь; питающая часть со стабилизаторами и трансформаторами; пишущее устройство; лентопротяжный механизм.
|
|
|
I |
Рисунок 9. Схема самобалансирующегося моста.
В основе принципиальной схемы электронной части самописца лежит мостовое устройство, составленное из датчика и реохорда (рис. 9). Полученное с мостовой схемы напряжение разбаланса подается на преобразовательное устройство Ф и затем на усилитель У. Балансировка моста осуществляется сервомотором Д (2АСМ-50), питаемым от усилителя напряжения разбаланса. Запись производится на миллиметровой бумаге
Рисунок 10. Схема индуктивного датчика БВ-844: 1 - корпус; 2 - катушки индуктивности; 3, 4 - диски; 5 - измерительный стержень.
Индуктивный датчик соединяется гибким шлангом со штепсельным разъемом, смонтированным на передней панели самописца. Датчик БВ-844 (рис. 10) состоит из корпуса 1, в котором размещены две катушки индуктивности 2. Роль якоря выполняют два диска 3, 4, укрепленные на измерительном стержне 5. При перемещении стержня изменяются воздушные зазоры между катушками и дисками, что вызывает изменение их индуктивности и приводит к разбалансу моста. Применяется также и датчик БВ-908, где индуктивные катушки укреплены на измерительном стержне. Перемещение их относительно специальных приливов на корпусе вызывает изменение индуктивности катушек.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.