МИНИСТЕРСТВО ОБРАЗОВАНИЯ УКРАИНЫ
ДОНБАССКИЙ ГОРНО-МЕТАЛЛУРГИЧЕСКИЙ ИНСТИТУТ
Кафедра автоматизации горной промышленности
и управляющих систем
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению лабораторной работы
"Измерение линейных перемещений с помощью индуктивных датчиков"
по курсу "ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИКИ"
(для студентов специальности 6.09250113)
"Автоматизация горно-технологических процессов и производств"
Утверждено на заседании
кафедры АГП и УС
Протокол № 5 от 14.12.99г.
АЛЧЕВСК, 2000 г.
ББК 3973.22
Методические указания к выполнению лабораторной работы "Измерение линейных перемещений с помощью индуктивных датчиков" по курсу "ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИЗАЦИИ" для студентов специальности 6.09250113 /Сост. В.А.Жуков. - Алчевск ДГМИ. 2000. - 20 с.
Рассматриваются датчики используемые в системах автоматизации рудничных механизмов и машин.
Составитель: В.А.Жуков, ст.преп.
Оформление: А.С. Садовский, ассистент
Ответственный за выпуск В.Д .Ирклиевский .проф.
ББК 3973.22
Методичні вказівки до виконання лабораторної роботи "Вимір лінійних переміщень за допомогою індуктивних датчиків" по курсу "ТЕХНІЧНІ ЗАСОБИ АВТОМАТИЗАЦІЇ" для студентів спеціальності 6.09250113 /Укл. В.О.Жуков. - Алчевськ ДГМІ. 2000. - 20 з.
Розглядаються датчики, що використовуються в системах автоматизації рудничних механізмів і машин.
Укладачi: В.О.Жуков, ст.викл.
Оформлення: О.С. Садовский, асистент
Вiдповiдальний за випуск: В.Д .Iрклiсвський .проф.
СОДЕРЖАНИЕ
1 Самостоятельная подготовка. 4
2 Краткие теоретические положения. 4
2.1 Индуктивные датчики. 5
3 Порядок выполнения работы.. 17
Содержание отчета. 20
Контрольные вопросы.. 21
Список литературы.. 23
Цель работы: Изучение работы датчиков линейных перемещений, основных схем, используемых в угольной промышленности, исследование различных схем его включения и с различным видом выходного сигнала.
1.1 Изучить принцип работы и схемы индуктивных датчиков перемещений [1с.47-54]. [2с.21-38; с.39-49].
1.2 Вычертить на бланке для отчета схемы датчиков перемещений согласно ГОСТа.
1.3 Подготовьте бланк отчета.
1.4 Подготовьте ответы на контрольные вопросы, помещенные в методическом указании и лабораторной работе.
Среди датчиков, входящих в систему автоматизации рудничных механизмов и машин, наибольшую группу составляют датчики перемещения (путевые датчики), которые в общем случае предназначены для измерения пути как аналоговой величины. Датчик перемещения выдает выходной сигнал, который является непрерывной или дискретной функцией координаты подвижного контролируемого объекта. При этом подразумевается, что траектория движения этого объекта строго фиксирована. Если датчик контролирует крайнее либо промежуточное положение объекта, то он именуется датчиком положения.
Различают также датчики поступательного и вращательного перемещения (движения). При необходимости эти датчики используются со звеньями, преобразующими поступательное движение во вращательное, или наоборот – безлюфтовыми реечными передачами, ходовыми винтами и т.п. рассматриваемые датчики широко применяются как преобразующие элементы в устройствах, чувствительные элементы которых имеют выходные сигналы в виде перемещений.
По принципу действия датчики перемещения делятся на механические, электроконтактные, индуктивные, индукционные, магнитные и электромагнитные, фотоэлектрические, ультразвуковые, трансформаторные, потенциометрические и др.
Индуктивный датчик представляет собой электромагнитный дроссель, индуктивность которого изменяется в зависимости от перемещения одной из подвижных деталей дросселя, чаще всего якоря. Датчик можно применять только на переменном токе. Простейший однотактный датчик с плоско-параллельным воздушным зазором 5 показан на рисунке 1.
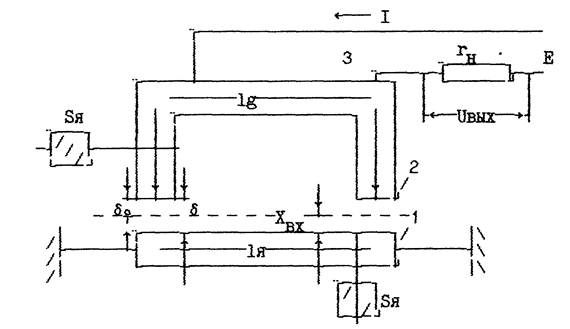
Рисунок 1 – Схема
однотактного индуктивного датчика:
1 – якорь; 2 – ярмо; 3 – обмотка.
Напряжение на выходе датчика:
где ![]() – активное сопротивление цепи.
– активное сопротивление цепи.
Если не учитывать потоков рассеивания, то индуктивность такого дросселя определяется по формуле:
где ω – число витков обмотки;
Rμ – магнитное сопротивление стали магнитопровода;
Rδ – магнитное сопротивление двух воздушных зазоров;
μo – магнитная проницаемость воздуха,
![]()
Входное перемещение якоря Хвх будет отсчитывать от начального положения его, когда δ=δo. Тогда δ=δo+Хвх и
где L0 – индуктивность в начальном положении якоря (Хвх=0; δ=δo).
![]() – относительное входное перемещение,
– относительное входное перемещение,
Подставив значение L в выражение для Uвых, получим:
 (1.1)
(1.1)
где
![]()
Из выражения (1.1) получаем действующее значения напряжения на входе
 (1.2)
(1.2)
Если при s = 0 магнитопровод не насыщается, то b ≈ const. Тогда, как видно из уравнения (1.2) Uвых является нелинейной функцией перемещения якоря Хвхот. Статическая характеристика датчика, построенная согласно этому уравнению для различных значений b показана на рисунке 2.
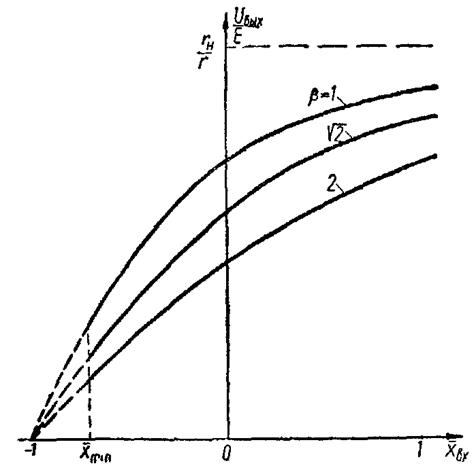
Рисунок 2 – Статическая характеристика однотактного индуктивного датчика.
Так как σmin =
0, то ![]() не может быть меньше:
не может быть меньше:
поэтому характеристики
левее точки ![]() =
= ![]() показаны штрихом.
показаны штрихом.
По уравнению (1.2) найдём:
Отсюда относительная статическая чувствительность датчика:
 (1.3)
(1.3)
Из условия  , находим оптимальное значение
, находим оптимальное значение
![]()
при этом значении β относительная статическая чувствительность датчика достигает максимальной величины:
 (1.4)
(1.4)
что соответствует абсолютной чувствительности датчика:
 (1.5)
(1.5)
Из выражения (1.5) видно,
что для повышения максимальной чувствительности датчика следует по возможности уменьшить
Rμ. Поэтому для магнитопровода обычно выбирают материал с большим
начальным значением магнитной проницаемости, например пермаллой. При этом, как
видно из выражения для![]() ,
увеличивается протяженность статической характеристики в отрицательную сторону.
Иногда в приближенных расчетах полагают Rμ ≈ 0 по
сравнению с величиной
,
увеличивается протяженность статической характеристики в отрицательную сторону.
Иногда в приближенных расчетах полагают Rμ ≈ 0 по
сравнению с величиной  .
.
Как видно на рисунке 2
при ![]() степень нелинейности характеристики
возрастает, а при
степень нелинейности характеристики
возрастает, а при ![]() характеристика становится
более пологой. В обоих случаях уменьшается статическая чувствительность.
характеристика становится
более пологой. В обоих случаях уменьшается статическая чувствительность.
Чтобы якорь удержать в заданном положении, необходимо входное усилие, уравновешивающее тяговое усилие электромагнита:
 (1.6)
(1.6)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.